

Дослідники з Університету Суррея у Великій Британії запропонували новий метод захоплення та утримання роботизованими системами крихких, слизьких чи асиметричних предметів.
Це може допомогти створити більш безпечні та надійні автоматизовані системи як у промисловості, так і у сфері охорони здоров’я. У новому дослідженні науковці зі Школи комп’ютерних наук та електронної інженерії Університету Суррея продемонстрували, як запропонований ними метод дозволяє роботизованим системам передбачати, коли предмет може зісковзнути, адаптуючи власні рухи в режимі реального часу для запобігання цьому.
Новий метод перевершує наявні технології захоплення, що використовуються сучасними роботизованими моделями. Він більш подібний до того, як люди природним чином адаптують власні рухи.
«Якщо уявити, що ви несете тарілку, яка починає ковзати, більшість людей не просто стискають її сильніше — вони інстинктивно коригують рух руки, сповільнюючи її, нахиляючи або змінюючи становище, щоб запобігти її падінню. Традиційно роботів вчили покладатися виключно на силу захоплення, що може бути неефективним або навіть пошкодити тендітні предмети. Ми навчили наших роботів діяти по-людськи: відчувати, коли щось може зісковзнути, і автоматично коригувати свої рухи, щоб утримати об’єкти у безпеці. Це може стати переломним моментом у галузі автоматизації майбутнього: від роботи з хірургічними інструментами у охороні здоров’я та складання делікатних деталей на виробництві до сортування незручних посилок у логістиці або допомоги людям по дому», — розповідає доктор Амір Есфахані з кафедри робототехніки.
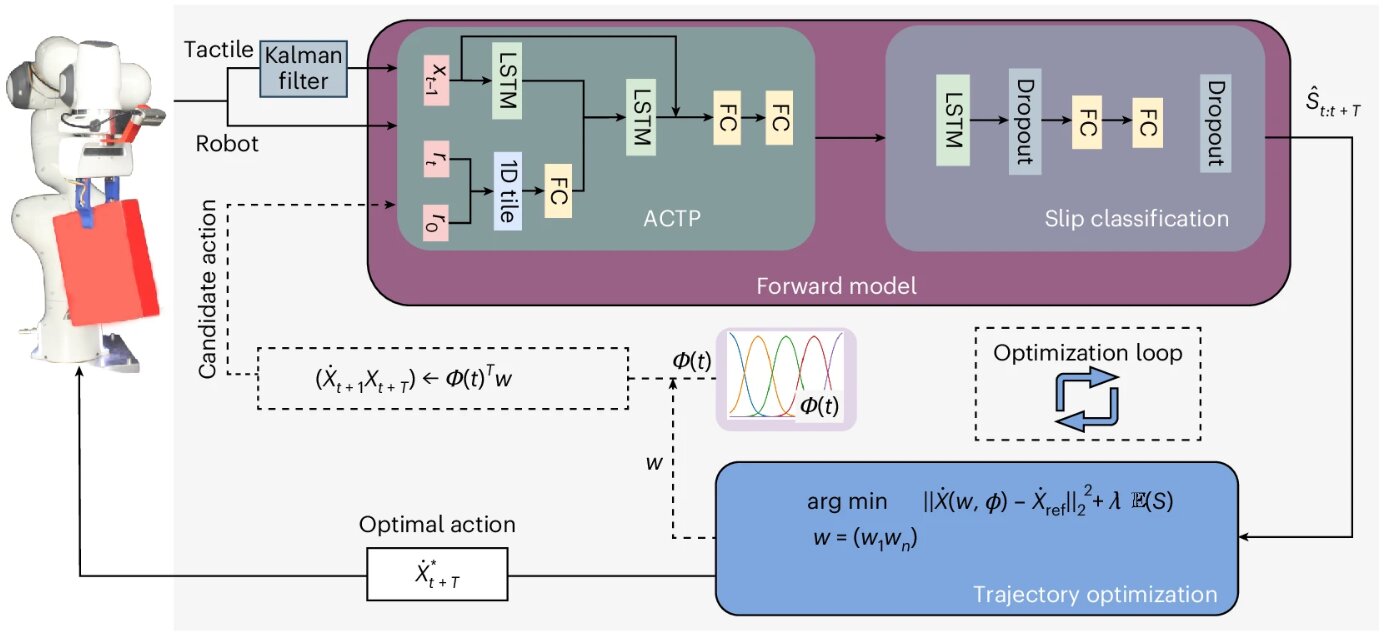
Результати продемонстрували, що система прогностичного управління, що працює на базі засвоєної «тактильної прямої моделі», дозволяє роботам передбачати можливість зісковзування об’єкта, постійно аналізуючи його заплановані рухи. Окрім цього дослідники продемонстрували, що система здатна працювати з об’єктами та траєкторіями руху, на яких не навчалась попередньо.
«Ми вважаємо, що наш підхід має значний потенціал для застосування в різних промислових та сервісних робототехнічних програмах, і наша робота відкриває нові можливості для впровадження роботів у наше повсякденне життя. Ми сподіваємося, що наші результати надихнуть на подальші дослідження в цій галузі та сприятимуть подальшому розвитку робототехніки», — підкреслив Амір Есфахані.
Результати опубліковані у журналі Nature
Джерело: TechXplore





Повідомити про помилку
Текст, який буде надіслано нашим редакторам: