

Когда робот протягивает человеку предмет или, наоборот, берет его, люди предпочитают, чтобы робот действовал с задержкой, сопоставимой с человеческой, а сами движения были медленными или умеренными по скорости, выяснили исследователи из Disney Research. При этом как большая, так и меньшая задержка делает робота менее «дружелюбным» в глазах пользователя, рассказывают авторы статьи, представленной на конференции IROS 2019.
Отметим, что значительная часть инженеров-робототехников занимается не собственно созданием роботов, а исследованием взаимодействия между людьми и роботами. Они изучают то, как люди воспринимают различные аспекты поведения роботов, и разрабатывают методы, повышающие уровень доверия к машинам и их привлекательность для людей.
К примеру, широко известен феномен «зловещей долины». Он заключается в том, что похожие на человека роботы, имеющие небольшие отклонения от внешнего вида или поведения людей, вызывают гораздо большую неприязнь и страх, чем менее человекоподобные роботы. Предполагается, что благодаря исследованию подобных аспектов человеческого восприятия, инженеры в будущем смогут создавать роботов, способных сосуществовать с людьми и помогать им, не вызывая негативных эмоций, что будет особенно полезно в случае с робопомощниками, которые, как ожидается, будут выполнять работу по дому.
Исследователи из Disney Research под руководством Гюнтера Нимайера решили узнать, какими должны быть движения робота, когда он обменивается предметом с человеком. Обычно после того, как нам протягивают какой-то предмет, мы начинаем протягивать руку к нему не мгновенно, а с небольшой задержкой. Роботы технически способны действовать с гораздо меньшей задержкой, однако исследователи задались вопросом, следует ли реализовывать это преимущество на практике.
В своей работе они использовали стенд, выглядящий, как человекоподобное туловище с рукой, снабженное сверху головой медведя (по-видимому, таким образом исследователи пытались немного отдалить образ робота от человека, чтобы избежать проявления эффекта «зловещей долины» из-за человеческого лица). Под «одеждой» у робота скрывался серийный роботизированный манипулятор KUKA, оснащенный антропоморфной мягкой кистью. Робот мог поднимать и опускать руку, а также хватать или отпускать предметы с помощью пальцев. В качестве модельного предмета авторы использовали кольцо с датчиками для внешней системы отслеживания, с помощью которой робот узнавал, что пользователь протянул ему кольцо.
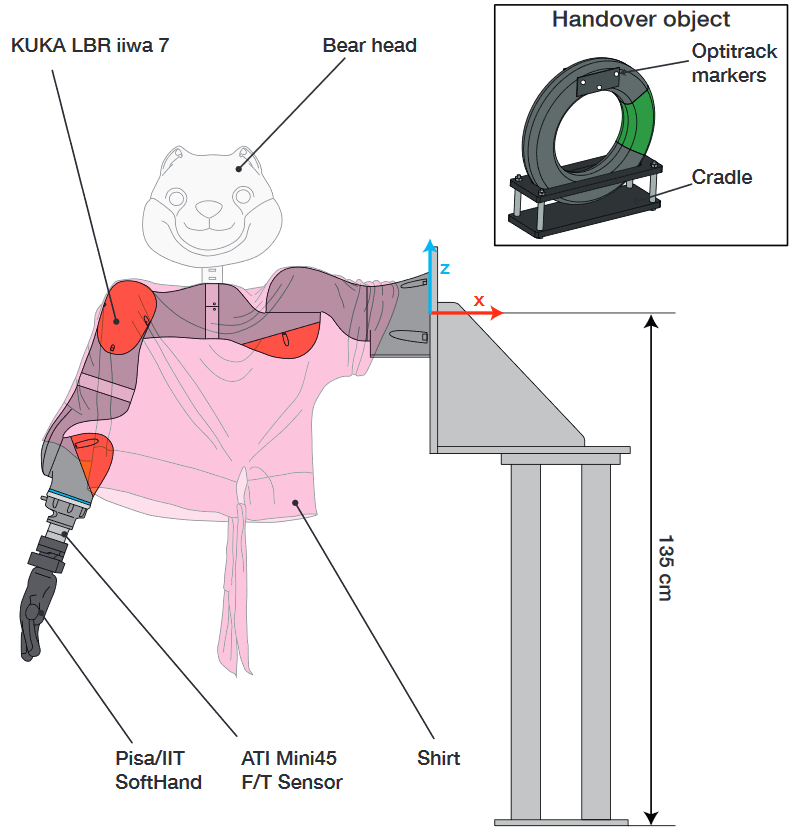
Во время экспериментов робот и доброволец (всего их было 18), находящийся от устройства на расстоянии 140 см, передавали друг другу кольцо, а после этого человек оценивал доброжелательность робота, его умение выполнять свою задачу, а также дискомфорт от взаимодействия при разных режимах работы робота. В общей сложности авторы создали и проверили девять режимов работы механизма, отличающихся скоростью движения манипулятора («быстрая», «умеренная» или «медленная», где «умеренная» скорость сопоставима со скоростью человека) и задержкой перед началом движения («без задержки», «небольшая задержка» и «большая задержка», где «небольшая задержка» сопоставима с задержкой человека).
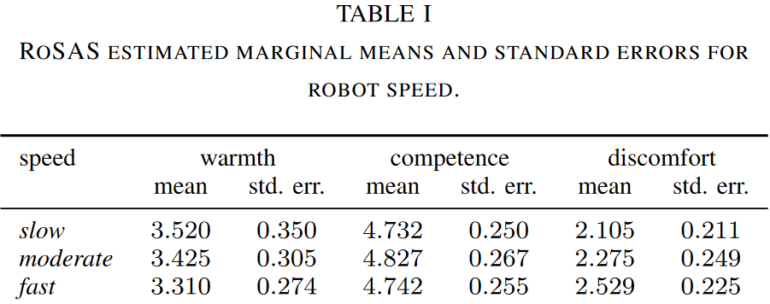
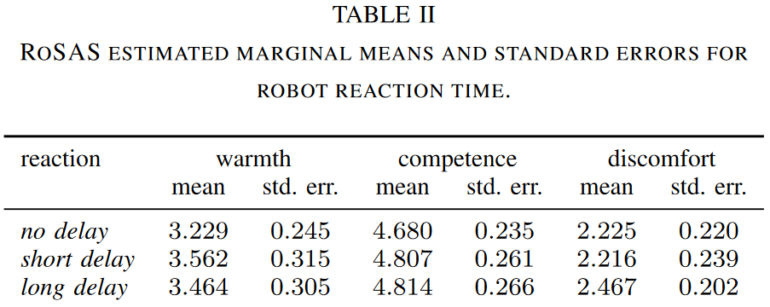
Восприятие робота в зависимости от его скорости и задержки.
Результаты эксперимента показали, что небольшая задержка, с точки зрения пользователей, делает робота наиболее дружелюбным, а также вызывает наименьший дискомфорт (большая же задержка, по мнению добровольцев, делает взаимодействие с роботом дискомфортным, а отсутствие задержки — недружелюбным). Что касается скорости, то исследователи обнаружили, что быстрые движения робота вызывают у добровольцев дискомфорт, но между умеренной и медленной скоростью они не нашли значимых различий. Специалисты указывают, что такие результаты могут быть обусловлены тем, что для человека робот, который не превосходит его в плане скорости движений и реакции, воспринимается как более «человекоподобный» и, как следствие, заслуживающий большего доверия.
Вместе с тем, авторы отмечают, что на впечатление от робота также может влиять его размеры или внешний вид, а потому для расстановки всех точек над «i» в данном вопросе необходимо провести еще ряд исследований.
Источник: N+1





Сообщить об опечатке
Текст, который будет отправлен нашим редакторам: