

Японские и британские инженеры создали робота, способного лазать по стенам и другим вертикальным поверхностям. Для этого он использует две вакуумные присоски и три шланга для душа. Статья с описанием разработки опубликована в журнале Soft Robotics.
Отметим, что перемещение по вертикальным поверхностям — технически сложная задача, которую необходимо решить, например, при создании устройств для ремонта или уборки фасадов зданий. Поскольку обычные колеса для этого не подходят, инженеры предлагают использовать для закрепления на поверхности другие, зачастую сложные, механизмы, такие как адгезия или электроадгезия. Однако устройства, использующие подобные решения, дороги в производстве, что делает выпуск доступных версий таких роботов труднореализуемым.
Свое решение проблемы на днях представили Фумия Иида и его коллеги из Кембриджского университета и Технологического университета Тойохаси, разработавшие концептуального лазающего робота, собранного из доступных компонентов и использующего простую конструкцию.
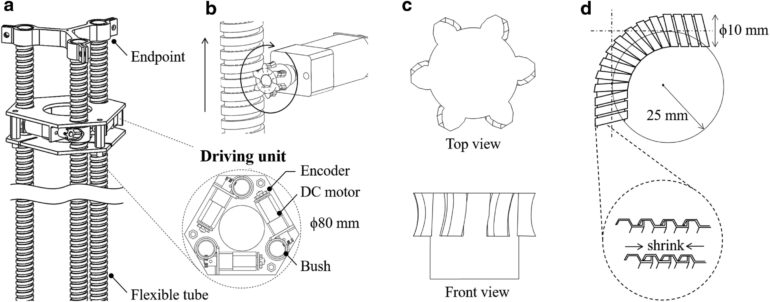
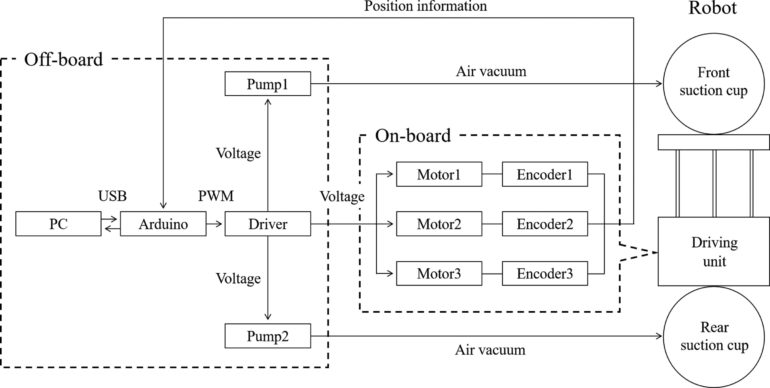
Как сообщается, незамысловатый агрегат состоит из трех обычных водопроводных шлангов, на конце и середине которых установлены две вакуумные присоски, соединенные с расположенными вне установки насосами. Три шланга жестко соединены между собой в конце, а также продеты через треугольную конструкцию в середине. В ней располагаются три запитанных от внешнего источника питания электродвигателя с шестернями, совпадающими по размеру с периодом оплетки шлангов. Управление аппаратом осуществляется посредством ПК пользователя, при этом непосредственный контроль перемещений возложен на Arduino Mega.
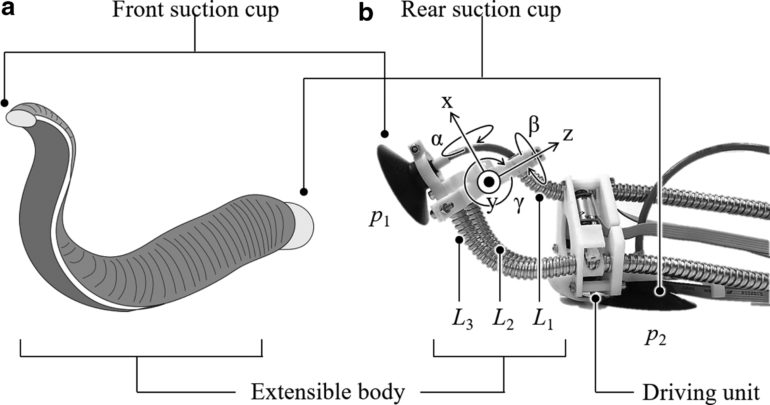
Во время движения по вертикальной поверхности робот сначала держится за стену с помощью обеих присосок, а затем, понижая давление в одной из них, отрывает ее от стены, передвигает прямо либо в сторону с помощью двигателей и закрепляет уже на новом месте. После этого аналогичные манипуляции проводятся со второй присоской. Таким образом робот может относительно свободно передвигаться по вертикальным поверхностям (как вверх, так и вниз).
Кроме того, в ходе демонстрационных испытаний инженеры показали, что робот, перемещаясь между поверхностями, способен преодолевать углы: в частности, разработчики продемонстрировали, как агрегат забирается на поверхность, повернутую на 90 градусов, и даже перелезает на параллельную поверхность — для чего ему приходится изогнуться на 180 градусов.
Инженеры отмечают, что каждая из двух присосок способна удерживать груз массой до 1,7 кг, а скорость движения робота во время экспериментов составляла до 2 сантиметров в секунду.
Истоник: N+1





Сообщить об опечатке
Текст, который будет отправлен нашим редакторам: