


Приближается тот день, когда вы сможете пройти мимо робота и даже не догадаться, что это робот. На протяжении лет разработок мы наделили роботов скелетами, мозгами, органами чувств и даже нервной системы. Мышцы оказались особенно сложными.
Исследователи из Гарвардской школы инженерных и прикладных наук имени Джона А. Полсона разработали метод 3D-печати искусственных мышцевидных нитей, движение которых фактически запрограммировано непосредственно в самом материале.
Их работа, кажется, является наиболее приближенной к человекоподобным мышцам среди всех существующих систем робототехнических мышц. Дело в том, что природный мир нуждается в гибкости. Все, от деревьев до осьминогов, сгибается и скручивается. Мы также построили человеческий мир, который требует такой же адаптивности. Инфраструктура, одежда, инструменты и даже социальное взаимодействие — все было разработано вокруг механики мягких биологических тел.
Почему это трудно и важно
Помимо гибкости, взаимодействие с нашим миром является одной из причин, почему инженеры-робототехники продолжают пытаться сделать машины более похожими на людей, оснащая их системами зрения (глазами), микрофонами (ушами), динамиками (ртом), датчиками прикосновения и многими другими системами.
Эти системы стали чрезвычайно функциональными и эффективными. Однако мышцы было трудно воспроизвести. Для людей мышцы — это просто еще одна вещь, которую мы не замечаем. Вы думаете о том, чтобы пошевелить рукой, и вдруг она поднимается, будто по мановению волшебной палочки. Это абсурдно сложная биологическая система привода.
«Те же мышцы, которые могут осторожно вести кисть по холсту, могут также выбивать двери, бросать топоры, выполнять балетные па или ловить падающую стеклянную посуду, прежде чем она ударится об пол. Такой уровень контроля впечатляет с инженерной точки зрения», — отмечают исследователи.
Традиционные роботы уже очень хорошо двигаются, используя электродвигатели, гидравлику и пневматические системы. Однако эти системы обычно жесткие, механически сложные и не слишком изящные. Действительно плавное, органическое движение остается гораздо более сложным для воспроизведения.
На самом деле исследователи уже разрабатывали мягкие робототехнические мышцы раньше. Пневматические искусственные мышцы, например, используют сжатое воздуха для создания плавного биологического движения. Другие системы используют термочувствительные металлы, электрически чувствительные полимеры, магнитные материалы или тросовые системы сухожилий, вдохновленные самим человеческим телом. Многие из них являются чрезвычайно эффективными.
В чем суть технологии
Эти системы обычно требуют громоздких внешних компрессоров, трубопроводов или тяжелых систем поддержки. Другие требуют чрезвычайно высокого напряжения, выделяют чрезмерное тепло, движутся медленно или их трудно изготовить в сложных формах. Во многих случаях сама «мышца» является лишь частью гораздо большей механической системы.
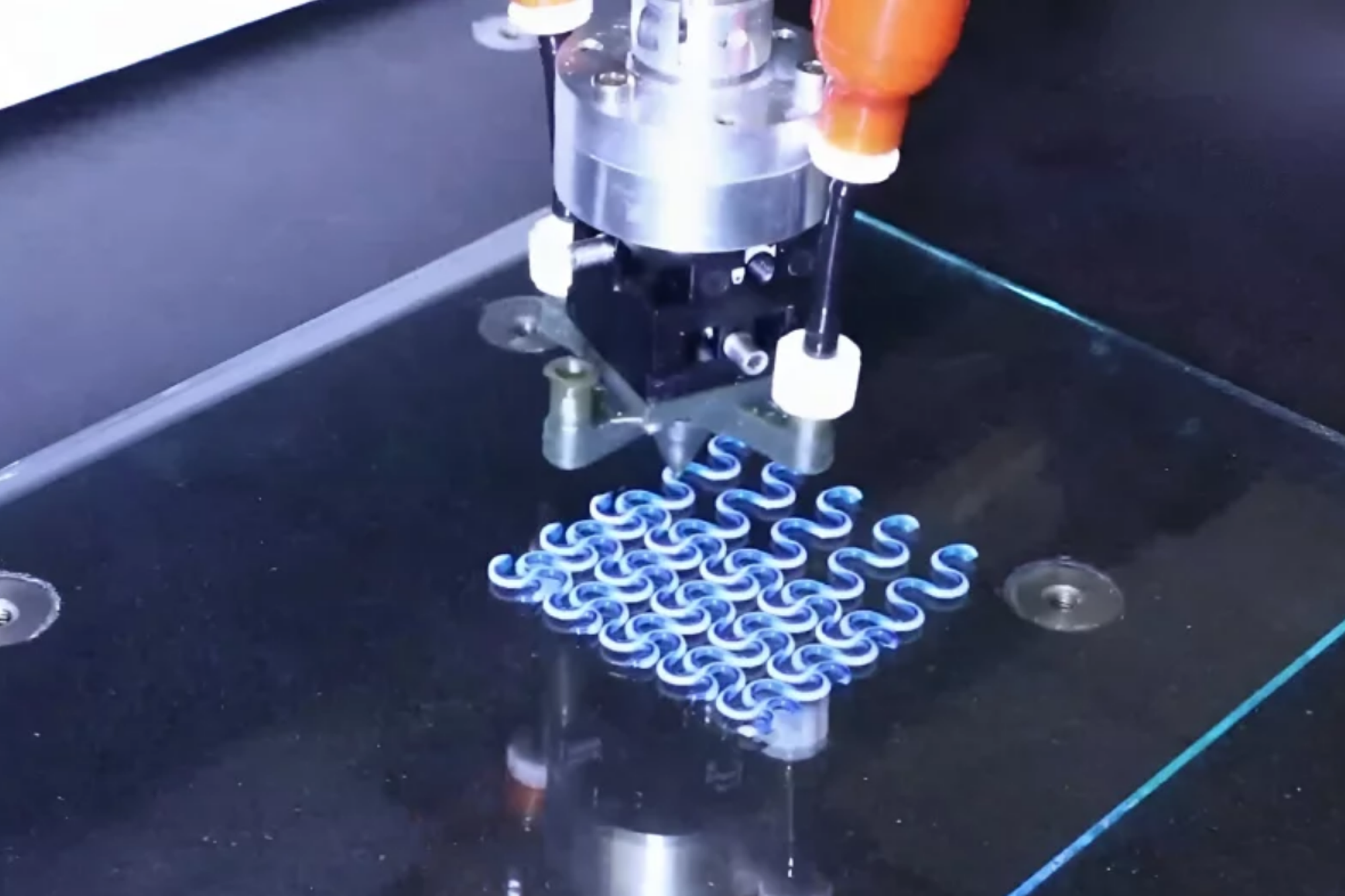
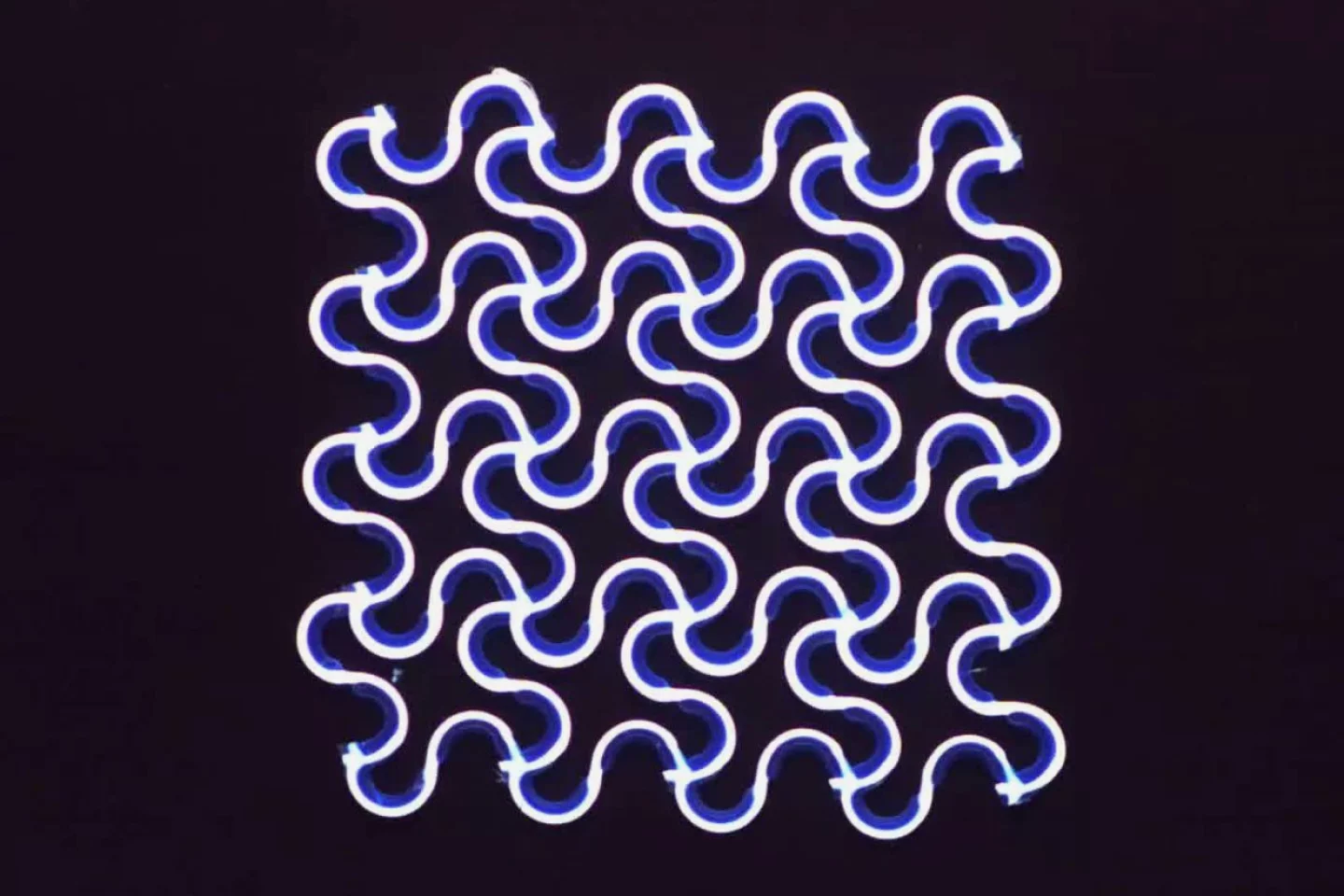
Исследователи нашли более элегантный подход. Вместо того, чтобы создавать роботов из отдельными двигателями и движущимися механизмами, команда разработала метод 3D-печати искусственных, похожих на мышцы, нитей, чье движение фактически запрограммировано непосредственно в материале.
«Наша система сочетает два типа мягких материалов: «активный» жидкокристаллический эластомер, который меняет форму при нагревании, и пассивный эластомер, который сопротивляется деформации. Печатая оба материала бок о бок через вращающееся сопло, мы можем точно контролировать, как различные части нити будут вести себя впоследствии», — говорится в исследовании.
Активный материал сжимается вдоль приоритетного молекулярного направления при нагревании. Поскольку пассивный материал сопротивляется этому сжатию, это несоответствие заставляет нить изгибаться, скручиваться, виться или сворачиваться в спираль. Вращение сопла во время печати добавляет еще один уровень контроля, записывая спиральные узоры молекулярного выравнивания непосредственно в структуру.
Одинарную нить можно запрограммировать на выпрямление, закручивание по спирали, затягивание, сокращение или расширение в зависимости от того, как расположены ее внутренние материалы — без шестерен, жестких соединений или механических систем послесборочного этапа.
«Наша команда продемонстрировала это, напечатав мягкие решетки и волнообразные нити, которые кардинально по-разному деформируются под действием тепла. Некоторые структуры расширялись при нагревании, тогда как другие сокращались. В одной демонстрации плоские решетки превращались в куполообразные формы. В другой мы создали мягкие захваты, способные опускаться на объекты, сжиматься вокруг них, поднимать их и впоследствии отпускать», — говорят исследователи.
Они добавляют, что эта технология со временем может позволить создать адаптивные мягкие роботизированные захваты, активные фильтры, биомедицинские устройства, термочувствительные структуры и роботизированные системы, изменяющие форму. Поскольку этот подход совместим с 3D-печатью, он также открывает двери для высоконастраиваемых архитектур, которые было бы трудно построить с помощью обычных актуаторов.
Однако все еще существуют серьезные ограничения. Сейчас система полагается на тепло для активации, что означает, что время отклика и энергоэффективность остаются сложными задачами. Структуры также все еще являются экспериментальными и далеко не готовы заменить традиционные робототехнические приводы в высоконагруженных сферах применения.
Источник: New Atlas





Сообщить об опечатке
Текст, который будет отправлен нашим редакторам: