
Є момент, який добре пам’ятають усі, хто мав справу з FPV: ти дивишся в небо, бачиш чистий горизонт — і за кілька секунд ситуація змінюється назавжди.
Ще зовсім недавно здавалося, що з дронами все більш-менш зрозуміло. Є сигнал — значить, можна виявити. Є сигнал — значить, можна заглушити. Сьогодні ця логіка більше не працює.
FPV-дрони на оптоволокні — вже не “екзотика” і не поодинокі експерименти. Це повноцінний робочий інструмент, під який більшість існуючих антидронових систем просто не проєктувалися.
Зміст
- 1 Чому оптоволокно ламає звичну логіку
- 2 Чому “старі” системи реагують занадто пізно
- 3 Про метрики, яким більше не варто вірити
- 4 FPV — це не детекція, це трекінг
- 5 Камера важливіша за нейромережу
- 6 Хороша камера може дати більше, ніж ще одна “краща” модель.
- 7 Погана погода не “ламає” систему — вона зменшує дальність
- 8 Кілька практичних порад
- 9 Нова дронова реальність та висновок
Чому оптоволокно ламає звичну логіку
Класична антидронова архітектура роками будувалась навколо радіо. Вся екосистема рішень спиралася на те, що дрон щось випромінює:
- RF-детекція;
- радіоелектронна боротьба;
- аналіз спектра;
- перехоплення або приглушення управління.
Оптоволоконний FPV проходить повз усі ці рівні.
- Він не випромінює;
- Не створює радіошуму;
- Не залишає характерних сигнатур у спектрі.
Фактично, такий дрон стає помітним лише в момент, коли потрапляє в поле зору. І саме тут починається найнеприємніше — залежність від людини. Людина — поганий сенсор для задач постійного спостереження.
І справа не в підготовці чи мотивації оператора. Це питання біології. Увага неминуче “провалюється”, мозок адаптується до статичної сцени, а дрону достатньо з’явитися в кадрі на секунду, іноді навіть менше.
Чому “старі” системи реагують занадто пізно

У сценаріях з оптоволоконними FPV РЕБ зазвичай спрацьовує вже на фінальній фазі, коли дрон або візуально виявлений, або вже зайшов у зону ураження.
Радари можуть бути ефективними, але вони дорогі, складні в розгортанні, не завжди доступні на тактичному рівні та мають власні обмеження по малорозмірних і низьковисотних цілях.
У результаті формується те, що на практиці виглядає як мертве вікно:
- радіосигналу ще немає;
- радару немає або він фізично далеко;
- людина ще не встигла побачити.
Саме в цьому вікні сьогодні відбувається більшість критичних подій.
Про метрики, яким більше не варто вірити
Коли починаєш працювати з комп’ютерним зором, дуже легко потрапити в пастку красивих цифр. mAP, precision, recall, FP/min — усе це виглядає переконливо в презентаціях і звітах. Проблема в тому, що в реальних умовах ці метрики часто втрачають сенс. Модель з гіршим mAP у лабораторії може стабільно вигравати в полі.
Тому що в реальності важливо не те, наскільки красиво система “малює бокси”, а:
- чи не пропустить дрон узагалі;
- чи побачить його раніше за людину;
- чи дасть кілька додаткових секунд на реакцію.
Для нас лабораторні метрики — це лише sanity-check. Фінальний критерій — польовий recall і час до потенційного удару.
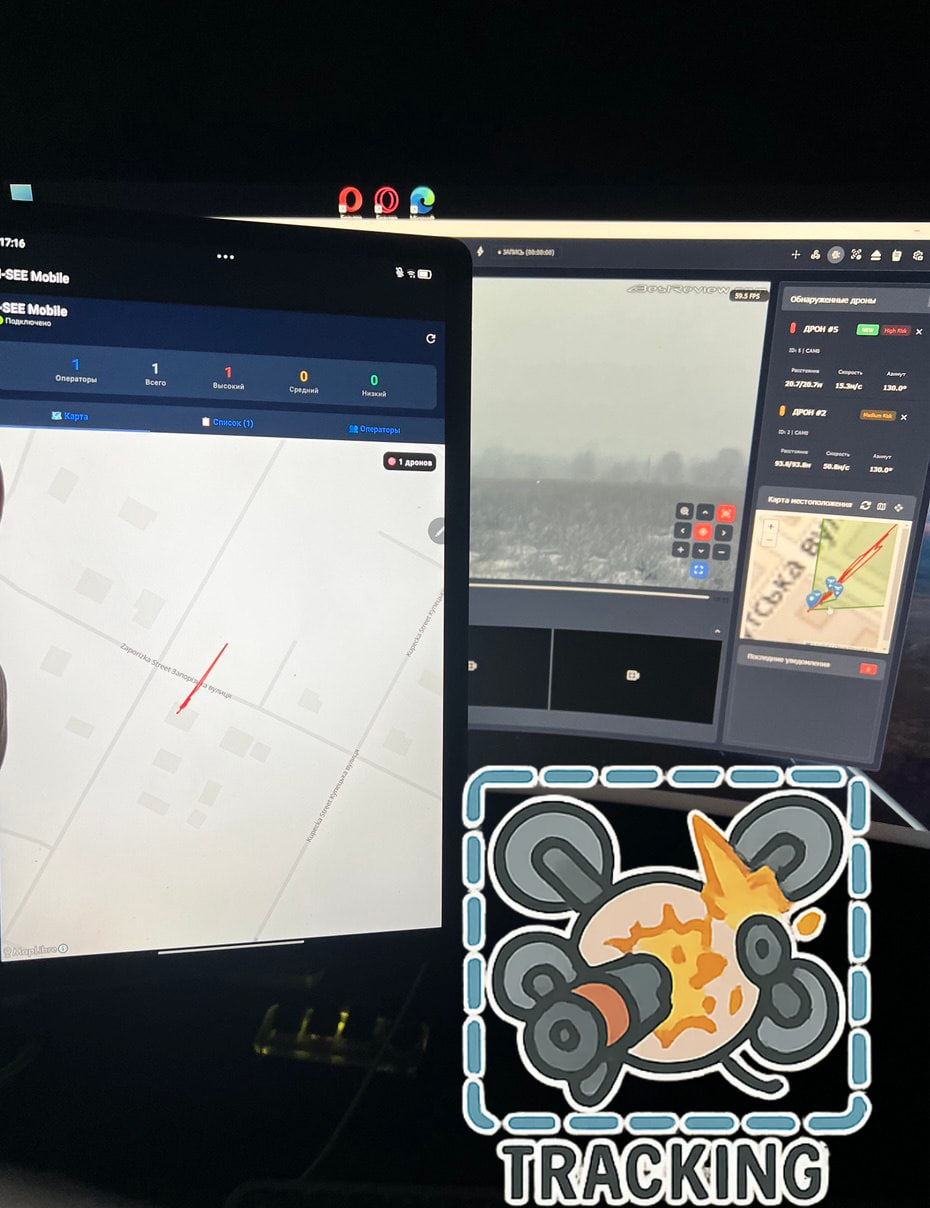
FPV — це не детекція, це трекінг
Одна з найпоширеніших помилок — сприймати FPV як окремий “обʼєкт”.
Коли ми перейшли від разової детекції до повноцінного трекінгу, кількість пропусків зменшилась не через “кращу нейромережу”, а завдяки стійкості до шуму й короткочасних втрат цілі.
FPV — це процес:
- кілька пікселів на складному фоні;
- різкі маневри;
- періодичні зникнення з поля зору;
- нестабільна візуальна сигнатура.
Птахи, хмари, дим, сміття, відблиски — усе це створює хибні сигнали. Якщо реагувати на кожен із них, оператор дуже швидко перестає довіряти системі.
Тому ключ не в тому, щоб повністю позбутися false positives, а в тому, щоб каскадно їх фільтрувати й утримувати стабільний трек.
Камера важливіша за нейромережу
Хороша камера може дати більше, ніж ще одна “краща” модель.
- високий SNR часто важливіший за кількість мегапікселів;
- global shutter дає помітну перевагу для швидких і малих цілей;
- агресивна обробка зображення на борту камери часто шкодить детекції.
Одна й та сама система на різних камерах може відрізнятися по дальності в рази. І це не питання алгоритмів — це питання фізики.
Погана погода не “ламає” систему — вона зменшує дальність
- Туман;
- Контрове світло;
- Сутінки;
- Дим;
- Дощ.
Критично важливо, щоб система не мала catastrophic failure. Вона повинна деградувати прогнозовано, а не “падати”.
Найскладніший сценарій сьогодні — нічні FPV без тепловізійного каналу. Це фізичне обмеження, з яким доводиться працювати.
Кілька практичних порад
- Не переоцінюйте РЕБ — він не універсальний.
- Інвестуйте в камеру і монтаж, а не лише в алгоритми.
- Думайте категоріями трекінгу, а не разової детекції.
- Оцінюйте системи в полі, а не по презентаціях.
- Секунди важливіші за відсотки точності.
Нова дронова реальність та висновок
Оптоволоконні FPV — це вже не нова загроза, а нова норма. Вони змушують переосмислити сам підхід до антидронової оборони.
Сьогодні виграє не той, у кого більше заліза чи потужніший РЕБ, а той, хто бачить раніше, стабільніше і без постійної участі людини. Іноді різниця між “побачити” і “не встигнути” — це буквально кілька секунд.





Повідомити про помилку
Текст, який буде надіслано нашим редакторам: