


Когда пионер в области робототехники, десятилетиями создававший «умные машины», советует держаться от роботов подальше, это наталкивает на тревожные размышления.
Родни Брукс, почетный профессор MIT и соучредитель компании iRobot, опубликовал новое техническое эссе, в котором утверждает, что не подходит к роботам-гуманоидам ближе, чем на 3 метра, и советует всем людям следовать его примеру.
«Мой совет людям — не приближаться ближе, чем на 3 метра к полноразмерному ходячему роботу», — пишет Родни Брукс в эссе под названием «Почему современные гуманоиды не научатся ловкости», опубликованном в его блоге на прошлой неделе. «Пока кто-то не придумает лучшую версию, с которой гораздо безопаснее находиться рядом и контактировать, мы не увидим, как роботов-гуманоидов сертифицируют для ходьбы в зонах с людьми».
Дорогая иллюзия
По мнению Брукса, компании, вкладывающие миллиарды в создание человекоподобных машин, гонятся за «дорогой иллюзией». Он утверждает, что современные двуногие роботы опасны для людей уже самим фактом передвижения: ведь для удержания равновесия, те накапливают много кинетической энергии и, если такой робот упадет и при этом зацепит человека конечностью, это может привести к серьезным травмам.
Создатель iRobot также ставит под сомнение распространенное представление о том, что роботы-гуманоиды вскоре заменят людей, научившись их ловкости по видео. Брукс не считает, что этого «не будет никогда», но реальное внедрение значительно дальше, чем думает большинство людей.
На фоне быстрого развития искусственного интеллекта вырос и общий ажиотаж вокруг роботов. К примеру гендиректор Tesla Илон Маск достаточно уверенно заявил, что их роботы Optimus смогут генерировать $30 трлн дохода в будущем, а босс Figure Бретт Адкок предполагает, что гуманоиды заберут «миллионы задач» у человеческой рабочей силы.

Законы физики в игре
ИИ может дать определенный прирост в программном обеспечении, но аппаратное гораздо сложнее и не работает в виртуальности, а пользуется «неумолимыми» законами физики. Брукс, который работает с робототехникой с 1970-х годов, утверждает, что компаниям-разработчикам не хватает ключевого ингредиента — ощущения прикосновения.
Аргументация ученого связана с тем, как Tesla и Figure, обучают своих роботов: обе используют только визуальный подход, когда работники носят камеры для записи таких задач, как складывание рубашек или подъем предметов; затем данные передаются моделям искусственного интеллекта, которые могут имитировать движение в новых контекстах.
Компания Маска недавно отказалась от костюмов захвата движения для сбора данных в пользу видеометода, с которым работники носят шлемы и рюкзаки, оснащенные пятью камерами; новая инициатива Figure «Project Go-Big» также опирается на передачу знаний непосредственно из того, что они называют «повседневным человеческим видео».
«Эти подходы игнорируют десятилетия исследований, которые показывают, что человеческая ловкость зависит от чрезвычайно сложной системы сенсорного восприятия», — пишет Брукс, ссылаясь на работу лаборатории Роланда Йоханссона из Университета Умео.
Вышеупомянутое исследование показало: когда кончики пальцев человека обезболены, то задача поднять и поджечь спичку занимает «неуклюжие» 30 секунд, вместо 7 в обычных условиях. Человеческая рука содержит около 17 000 механорецепторов (причем по 1000 только на каждом из кончиков пальца), поэтому их неподвижность затрудняет или даже делает невозможным ряд повседневных действий.

Другое современное исследование лаборатории Дэвида Хинти из Гарварда выявило 15 различных типов нейронов, отвечающих за ощущение прикосновения: от легкого нажатия до вибраций и растяжения кожи. Это огромный массив сенсорной информации, которую современные роботизированные системы еще не могут ни воспроизвести, ни симулировать.
Цель — устоять на ногах
Кроме проблемы с ловкостью, есть более насущный вопрос безопасности. Современные гуманоидные роботы используют мощные электродвигатели и давний алгоритм «zero moment point» для поддержания равновесия. Подход работает достаточно хорошо для того, чтобы удержать робота в вертикальном положении много времени, но создает то, что Брукс называет «фундаментальной несовместимостью» для пребывания рядом с людьми.
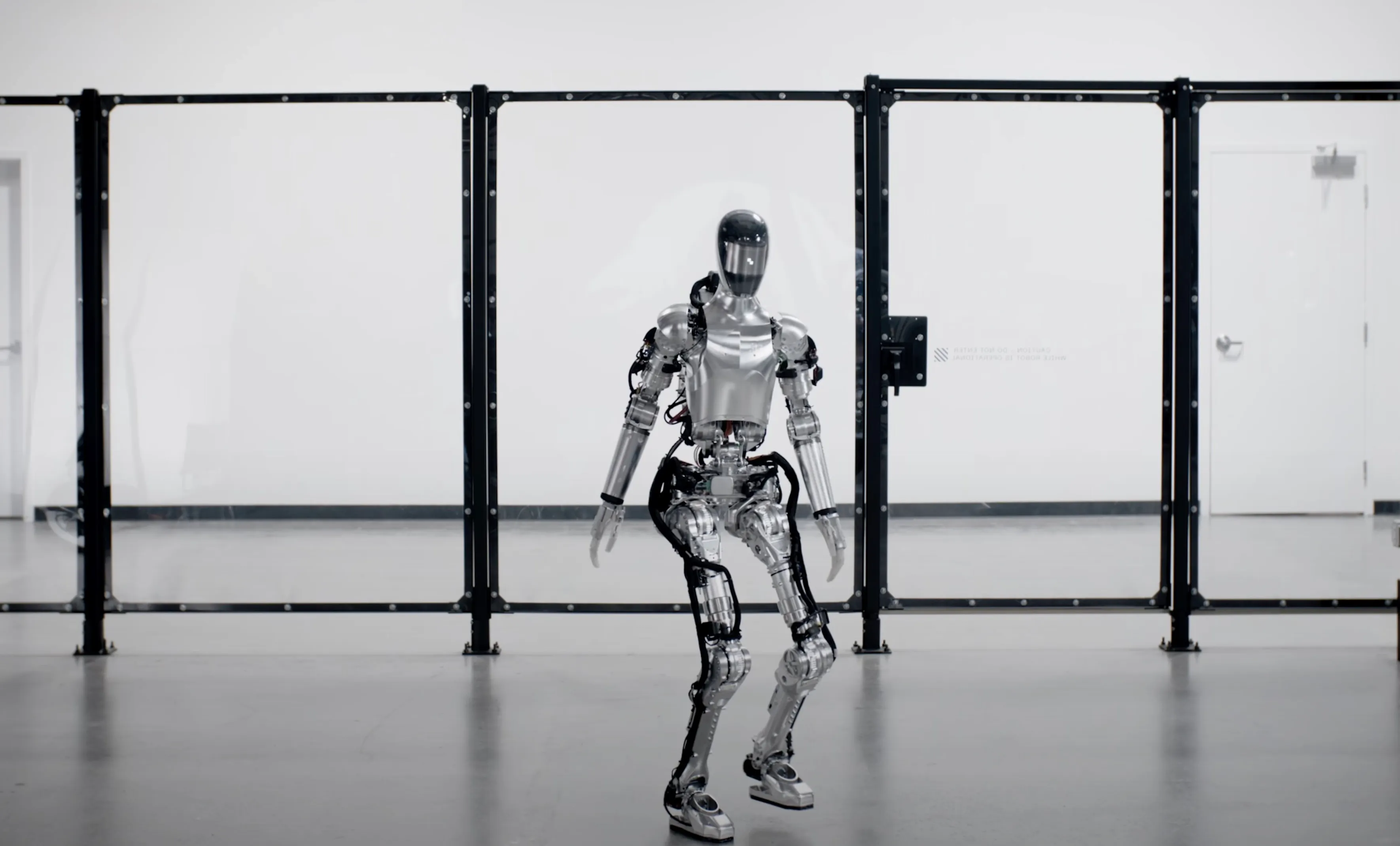
Особый риск представляют полноразмерные модели. По словам ученого, когда вы увеличиваете робота вдвое — его масса увеличивается в 8 раз, настолько и кинетическая энергия, а также уровень повреждений для людей. Брукс вспоминает собственный пример, когда несколько лет назад «находился слишком близко» к роботу Agility Robotics Digit, когда тот упал. С тех пор он не решался приблизиться к роботам. Собственно и реклама редко когда показывает движущихся роботов рядом с людьми, разве что они разделены мебелью.
На видео: один из футбольных ивентов на Олимпиаде для роботов в Китае
Эта проблема выходит далеко за пределы обычных падений. Чтобы роботы выполняли свою обещанную роль на производстве, им необходима сертификация для работы в зонах, общих с людьми. Современные механизмы делают такую сертификацию практически невозможной, если взглянуть на стандарты безопасности большинства стран мира.
Хотя Брукс прогнозирует, что эту проблему можно исправить лет через 15, но с очевидным ограничением: будущие «гуманоиды» будут иметь колеса вместо ног, большее количество рук и специализированные датчики, которые не будут иметь ничего общего с человеческими глазами (некоторые камеры будут в руках).
«Определение «гуманоид» изменится так же как «летающие авто» превратились в «электрические вертолеты», а «авто без водителя» на «авто с дистанционным управлением от человека».
По материалам блога Родни Брукса и статьи Бенджа Эдвардса на ArsTechnica





Сообщить об опечатке
Текст, который будет отправлен нашим редакторам: