



2015-й годы мы начали с темы электромобилей как ближайшего будущего. Но есть еще одно направление развития транспорта, которое может перевернуть мир едва ли не круче, чем электромобили – это автономный транспорт. Сегодня такие машины выглядят пришельцами из далекого будущего, но реально находятся на расстоянии лишь нескольких лет. И вот почему…
Автономный транспорт – понятие очень растяжимое: начиная от системы помощи при парковке (самостоятельная парковка автомобиля) и заканчивая автомобилем, который самостоятельно проезжает весь путь «из точки А в точку Б» – все это автономный транспорт. Первый вариант реализован уже сегодня: автоматическая парковка, удержание автомобиля в своей полосе на дороге, адаптивный круиз-контоль, который умеет разгонять и тормозить автомобиль – все эти функции уже можно встретить в автомобилях даже среднего класса, и для них уже существует свой термин «частичная автономность».
А вот «полная автономность» – когда автомобиль сам едет из точки А в точку Б – намного сложнее в реализации. Однако полностью автономный транспорт дает столько преимуществ, что его разработкой обязательно следует заниматься. К примеру:
- радикальное сокращение ДТП – сегодня более 90% аварий происходят по вине водителя;
- уменьшение загрузки дорог – автомобили можно заставить ехать ближе друг к другу;
- освобождение времени для водителя – можно читать, отдыхать, общаться с друзьями;
- снижение расхода топлива – благодаря оптимизации стиля езды, что недостижимо для водителя-новичка или агрессивного стиля вождения; и т.д.

Автономный транспорт через несколько лет должен оказаться там, где сегодня находятся электромобили: пусть еще не широкая популярность, но уже реальность и доступность для обычного покупателя. Обратите внимание – на фото Nissan Leaf пересекаются две самые современные технологии в мире автомобилестроения: электрический привод и автономное управления
Также важно отметить, что полностью автономный транспорт существует уже несколько лет, проводились гонки подобных машин в пустыне и по имитации города. Но все это единичные экземпляры. А рынок заинтересует автономный транспорт, который может ездить в автоматическом режиме практически всегда и везде, но при этом будет стоить аналогично или лишь чуть дороже обычных машин. То есть к 2020 году автономный транспорт должен оказаться там, где сейчас электромобили – пусть еще не массовый приход на рынок, но уже довольно заметный сегмент; есть несколько вариантов, есть конкуренция; цена решения сопоставима со схожими обычными машинами. А по-настоящему массовым автономный транспорт должен стать к 2025-2030 году.
Можно до хрипоты в горле заявлять, что «я хочу ездить сам», но от этого никуда не деться: автономный транспорт – это одна из ближайших глобальных целей в развитии транспорта вообще, на уровне важности прихода электромобилей, если не больше.
Как это работает?
Давайте разберемся, как работает автономный транспорт. Условно все функциональные элементы можно разделить на три части, связанные между собой единой цепочкой: исследование информации вокруг автомобиля + обработка и принятие решения + выполнение этого решения. С последним пунктом все просто уже сегодня: электрический усилитель руля позволяет поворачивать автомобиль вправо-влево как угодно; электро-дроссель и АКПП позволяют разгонять автомобиль; электроника в управлении тормозами (ABS, ESP, автоматический «ручник») позволяет замедлять и останавливать автомобиль. С приходом электрокаров реализация команд и управление автомобилей становится еще проще. Следующее – за обработку и принятие решений отвечает «электронный мозг» системы: ранее это были несколько блоков, но сегодня все идет к более правильному решению с одним блоком (пример Audi, см. ниже).

В упрощенном представлении автономный транспорт – это дальнобойный радар спереди да датчики кругового обзора вокруг автомобиля…
Обычно при разговоре об автономности массу внимания уделяют именно первому блоку – всем системам, которые видят, что происходит вокруг автомобиля. Традиционный набор выглядит так: лидар (лазерный радар) + обычные сенсоры (как партноник) + камера (визуальное восприятие информации) + GPS-привязка к электронным картам + облачный сервис и общение с другими автомобилями. Но если копнуть глубже…
К примеру, можно рассмотреть опыт компании Volvo в создании автономного транспорта, где шведы, пожалуй, одни из лидеров рынка. В автомобилях, разработанных и построенных по проекту «Drive Me», используется: лазерный сканер в передней части автомобиля – для обнаружения объектов вдалеке (дальность 150 м, охват 140 градусов); три камеры с разным охватом (34, 45, 140 градусов) в едином блоке у лобового стекла – для визуального восприятия информации и измерения расстояния до него; радары дальнего действия в углах заднего бампера – для обнаружения объекта сзади при необходимости перестроения из ряда в ряд; радары в углах всех бамперов и 4-е камеры по периметру автомобиля – для создания точной картинки кругового обзора на 360 градусов; 12 датчиков по периметру – для создания картинки и обнаружения объектов вокруг автомобиля во время парковки (пешеход переходит дорогу за машиной). И это лишь датчики и радары, а ведь есть еще и нюансы GPS-карты или работы облачного сервиса. К примеру, Volvo разрабатывает т.н. «3D GPS карту», где обычная оцифрованная карта местности дополнена 3-осевым акселерометром и гироскопом с 3-мя степенями свободы. Итого автомобиль получает информацию не только о том, куда он едет согласно карте, но и понимает, что он едет с ускорением (спускается с горки) и с небольшим поворотом, к примеру, вправо. Плюс добавьте к этому возможности облачных сервисов, где машины постоянно общаются между собой и могут заранее предупредить о гололеде или ДТП на дороге. Часть технологий уже была описана в наших статьях о Volvo.

… но компания Volvo показывает, что на самом деле не все так просто в контроле окружающей обстановки вокруг автомобиля: одним лазером и парой датчиков никак не обойтись
Ожидаемо, что объем данных, который нужно обрабатывать автономному транспортному средству в реальных условиях (а не на искусственном полигоне) просто огромен. Причем логичная цепочка «получение сигнала – обработка и решение – команда на выполнение» вполне может проходить по разным каналам и система, которые не пересекаются между собой. Первый автономный транспорт имел так много различных компьютеров и блоков для обработки сигналов и принятия решений, что они занимали едва ли не весь багажник автомобиля. Решение этой проблемы – в объединение всех систем (и датчиков для получения сигнала, и исполнителей команд) в едином блоке управления. Подобное решение уже сейчас прорабатывает компания Audi (в партнерстве с Delphi, NVidia, и другими компаниями) в своем блоке управления zFAS. Уже сегодня блок zFAS имеет размеры сопоставимые с планшетом, расширяемую архитектуру, многоядерный процессор. Этот блок можно использовать для разных целей и управления различными системами автомобиля, но именно тема автономного транспорта стала первопричиной его разработки – и именно для управления автономным транспортом блок zFAS и разрабатывался в первую очередь. Идея уже есть, она воплощена в реальность, однако серийного выпуска zFAS следует ожидать лишь через несколько лет.
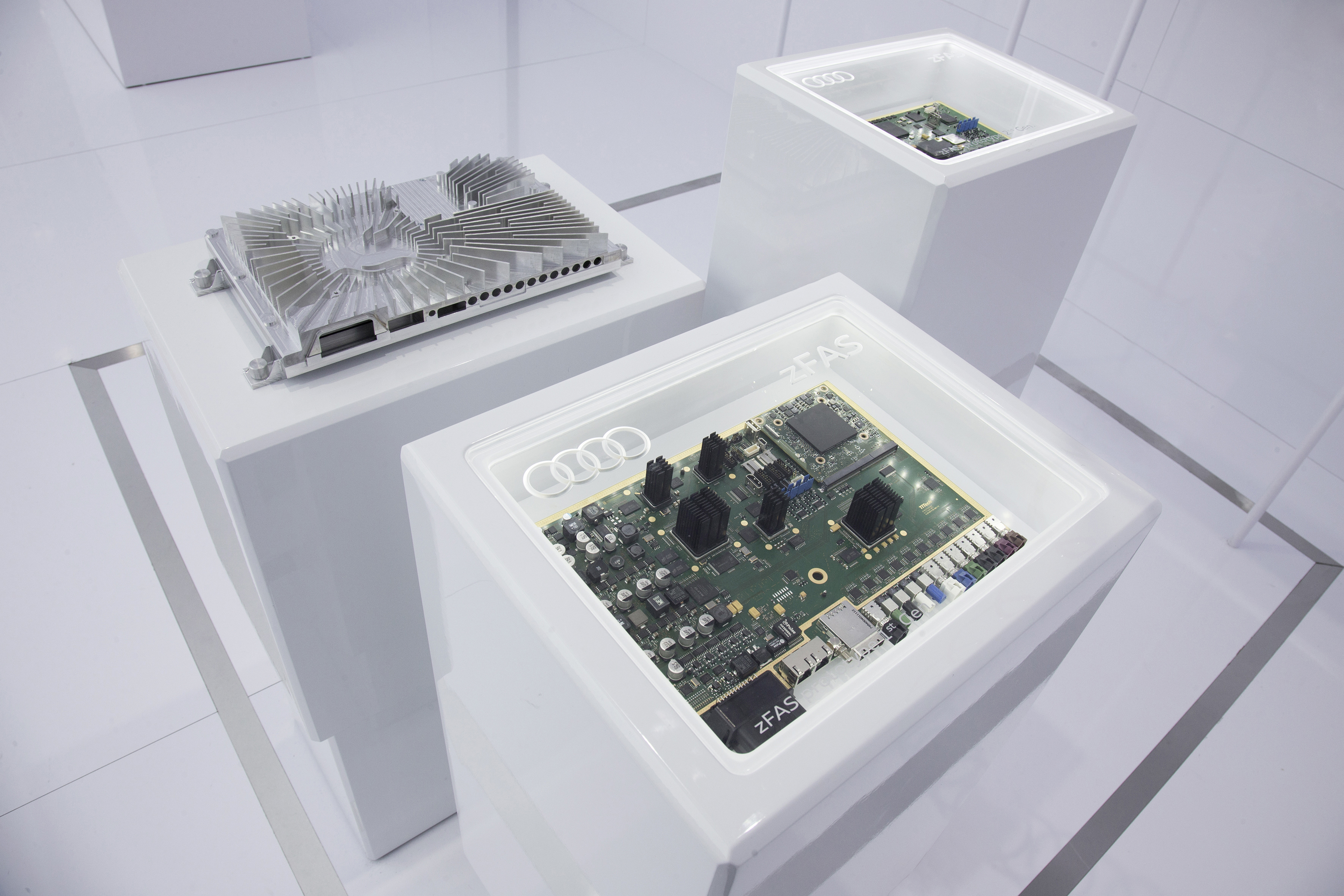
Блок zFAS может обрабатывать информацию с 22-х датчиков, включая и лазерный радар, обрабатывать данные, и отдавать команды исполнительным механизмам (газ, тормоз, поворот)
А какие еще проблемы ждут автономный транспорт? И что можем ему помочь?
Неожиданные проблемы и неожиданная помощь
Автономный транспорт – это следующий виток, следующая эра развития вообще. Как и всегда в подобных случаях, возникают проблемы не только с самой идеей и ее воплощением, но и с окружающей действительностью.
К примеру, одна из главных проблем – юридическая ответственность в случае ДТП. До сих пор не ясно, кто будет отвечать за произошедшую аварию. Водитель – за то, что не взял управления в свои руки в критический момент? Производитель автомобиля – за то, что не «научил» машину тормозить или объезжать препятствие? А может разработчик ПО – ведь, фактически, именно он и должен был «учить» автомобиль? Или интернет-провайдер – за то, что не обеспечил должную скорость передачи данных и автомобиль вовремя не узнал из «облака», что через 2 км его ждет обледенелый поворот? Сегодня только в нескольких штатах США разрешено использование автономного транспорта и то при условии, что за рулем автомобиля будет находиться опытный водитель, прошедший соответствующую аттестацию, имеющий определенный допуск, и т.д.
Следующая проблема – скорость обновления карты GPS и реальной ситуации на дороге. Как автомобиль должен знать, что еще вчера по одной дороге можно было проехать, а уже сегодня она закрыта на ремонт? Частично эту проблему могут решить облачные сервисы и обмен информацией между автомобилями. Но здесь возникает вопрос быстрой передачи данных и наличия интернета «всегда и везде».

Автономный транспорт сильно «завязан» на GPS-карты и облачные сервисы, а потому очень важен быстрый интернет – для обновления карты и получения информации о состоянии дороги, ремонтах, объездах и т.д.
Еще одна проблема – психология водителей. К примеру, компания Google при тестировании своих прототипов обнаружила, что они едут слишком мягко, плавно, аккуратно. Реальные водители предпочитают более активный стиль вождения. Это стало проблемой, к примеру, при необходимости выезда со второстепенно дороги на главную (нужно быстро разогнаться и вклинится в поток) и при перестроения из ряда в ряд. Сегодня Google заставляет свои тестовые автономные машины ездить активнее, но в будущем, скорее всего, будет несколько режимов езды на выбор водителя. Еще один нюанс: а куда водителю деть руки? Ведь в обычной машине руль используется не только как орган управления, но и как точка опоры для рук.
Также существует проблема тестирования автономного транспорта. К примеру, компания Nissan еще в 2014 году начала строительство специального полигона для тестов автономного транспорта. Схожий полигон создала и компания Volvo, плюс в Китае запущена программа China FOT по исследованию психики и поведения водителя в разных ситуациях – эти данные пригодятся и для создания автономного транспорта. Тема автономного транспорта уже продвигается не только компаниями, но и на уровне государственных администраций: в Германии идет активная работа по созданию первого автобана для автономного транспорта; правительство Великобритании думает над изменением и упрощением законов (ПДД), чтобы привлечь исследователей автономного транспорта; в США уже существует практика допуска автономного транспорта на обычные дороги при выполнении ряда условий (см. выше).
И подобная помощь «откуда не ждали» приходит снова и снова. Так, широкое распространение электрокаров существенного упрощает управление в цикле «разгон-торможение». Неудивительно, что компания Nissan строит свои автономные машины именно на базе электрокара Leaf. Но еще более интересны другие наработки Nissan. К примеру, «опыт рыб и пчел». Разработчики Nissan обратили внимание та поведение животных и их взаимодействие друг с другом: очень интересным оказался опыт изучения поведения рыб и глаза шмеля. В результате была создана система EPORO (EPisode 0 Robot), в которой используется система лазерного обнаружения (LRF), созданная с учетом строения составного глаза шмеля с углом обзора более 300 градусов. В тоже время шесть модулей EPORO обмениваются данными друг с другом для контроля препятствий и предотвращения столкновений с препятствиями или объектами, движущимися рядом в группе или по отдельности – аналогично движению рыб в стаях.

Nissan работает с теорией «рыб и пчел», сотрудничает с NASA, строит свой полигон для тестирования автономных машин – в новом и неизведанном деле хороши любые способы, которые позволяют двигаться вперед
Как заявляют разработчики Nissan «движение рыб подчинено трем правилам: не смещаться слишком сильно в сторону, не уменьшать дистанцию ниже определенного предела и не сталкиваться с другими рыбами. Пользуясь этими правилами, они движутся в стаях, причем стаи перемещаются без использования какой-либо разметки, но рыбы плывут на очень малых расстояниях друг от друга. Поэтому, если автомобили смогут двигаться в группах по такому алгоритму, то при неизменной ширине проезжей части на ней будет помещаться большее количество автомобилей. Это позволит увеличить объем транспортных потоков без образования пробок и ДТП».
Добавьте к этому совместную работу Nissan и NASA в области создания нового интерфейса управления «человек-машина» (вспомните: нет руля – где деть руки?) и разработку необходимого ПО. Снова помощь пришла «откуда не ждали». Но пришла.
Примеры автономного транспорта: реальные и не очень
Теперь давайте рассмотрим несколько примеров автономного транспорта – как теория работает на практике.
Начнем с проекта Apple Titan, который «громко, но случайно» появился в начале этого года (мы уже о нем рассказывали). Одна из важных составляющих будущего «яблочного электромобиля» – его автономность. Однако когда само создание электромобиля является лишь слухами и догадками, что уж говорит о системе автономного управления.
Намного ближе к реальному созданию автономного транспорта стоит прямой конкурент Apple – компания Google, которая уже несколько лет экспериментирует с автономным транспортом. Так, компания Google работала с Toyota и строила свои машины на базе Toyota Prius и Lexus RX; разработала собственный Google-мобиль в виде 2-местной капсулы; встречалась информация, что Google хотела выкупить компанию Tesla. Словом, компания Google в который раз больше работает над ПО, нежели над конкретным воплощением идеи «в железе». И в целом стратегия Google правильна в том, что компания разрабатывает решения и, можно не сомневаться, что в будущем будет адаптировать его для всех и для каждого. Скорее всего, что «автономность от Google» для автомобилей станет тем же самым, что и ОС Android для смартфонов – подобное решение устроит всех: и разработчика ПО, и производителей автомобилей (особенно, если можно будет создать свои надстройки над системой, подобно фирменным оболочкам над Android).

Первая поездка автономной машины Google. Причем это даже не машина, а больше «капсула» для городских перемещений. Первая партия из 100 Google-каров должна выехать на реальные дороги уже к 2017 году. Наверняка компания будет использовать их для отработки логики движения в городе – это самая сложная задача для автономного транспорта
Следующий пример вытекает из связи с Google – это электромобиль Tesla Model S. Сложите воедино несколько факторов: Tesla претендует на звание самого инновационного автомобиля и пытается всячески это показать; возможная покупка Google компании Tesla (значит присматривались и изучали друг друга); уже существующая функция «автопилот». Компания Google рассчитывает представить полностью автономный транспорт даже ранее знакового 2020 года – ориентировочно уже в 2017 году. Примерно к этому времени можно ожидать и заметного обновления Tesla Model S (не просто апгрейд ПО, но и технические изменения) – не удивлюсь, если «полная автономность» от Google впервые появится именно на новой версии Tesla Model S.
На фоне таких имен как Apple, Google, Tesla – передовые компьютерные компании и электрические технологии – кажется, что традиционные автопроизводители безвозвратно отстали. Но это не так, многие компании ведут свои разработки автономного транспорта.

Компания Volvo разрабатывает проект Drive Me независимо от модели автомобиля – это может быть и новейший XC 90 (на фото выше) и уже известные модели S60 или V60: можно не сомневаться, что шведы могут научить ездить в автоматическом режиме любой из своих автомобилей
Прежде всего, речь идет о компаниях Volvo, Nissan, Audi, BMW. Так, Volvo несколько лет работает над проектом «Drive Me» в рамках которого компания хочет создать полностью автономную машину. Первые экземпляры уже ездят по дорогам, а к 2017 году Volvo рассчитывает выпустить на дороги 100 полностью автономных автомобилей. Причем, внимание, выпустить 100 автомобилей на обычные дороги, в реальный мир, реальный город, реальную трассу. Компания Volvo ставит перед собой очень амбициозную задачу, которая звучит как «безотказная система»: если в экстренном случае предполагается, что автономный транспорт будет призывать на помощь водителя, то Volvo хочет создать автомобиль, который даже в экстренной ситуации будет вести себя правильно. И только в том случае, если система совсем не может справиться с ситуацией, а водителю стало плохо – автомобиль сам подрулит и припаркуется у обочины.
Компания Nissan ведет работу над проектом «Autonomous Drive», в рамках которого были созданы автономные Nissan Leaf и проходят все наработки, описанные выше («опыт рыб и пчел», работа с NASA). Еще в конце 2013 года первые автономные Nissan Leaf уже ездили по дорогам. Сегодня автономный транспорт от Nissan умеет самостоятельно соблюдать свою полосу, перестраиваться и ряда в ряд, выезжать и заезжать в поток автомобилей, проезжать круговые развязки, выполнять обгон, и пр.

Audi тесно работает с Delphi и другими компаниями над созданием автономного транспорта, и уже добилась в этом определенных успехов. Так, в плюсы Audi, помимо блока zFAS, можно записать и длиннющий (5 633 км) пробег на автономном Audi SQ5
Следующий пример – компания Audi, которая работает в партнерстве с Delphi (крупный производитель и поставщик автомобильных компонентов) и другими компаниями. Уже сегодня существует несколько автономных прототипов Audi, которые за последнее время проехали сразу несколько путешествий, преимущественно в автономном режиме. Первая серийная автономная модель от Audi должна появиться примерно в 2017 году (новая Audi A8), но изначально речь идет об автономности в пробке: автомобиль сможет двигаться сам на скорости до 16 км/ч, маневрировать, останавливаться и т.д. После этого ожидается повышение скорости до 60 км/ч; затем – повышение скорости автономной езды почти до максимальной скорости автомобиля.
Другие немецкие премиум-бренды также стараются не отставать. Компания BMW уже давно работает над созданием автономного транспорта – и самостоятельно, и в партнерстве с другими компаниями (к примеру, концепт Rinspeed Budii). Мало того, фирма BMW как «динамичный бренд», даже научила свои автономные машины ездить в боковом заносе без участия водителя…
Интересно, что электронная система сама может вести автомобиль в боковом заносе. Но какой в этом смысл? Ведь весь «фан» от заноса как раз в том, что «смотрите, как я умею!»
А компания Mercedes недавно показала концепт F015, где автономность является одной из главных изюминок. Словом, процесс идет и движет его не одна компания, а многие лидеры своих областей – и инновационные компьютерные компании, и известные производители автомобилей. Поэтому можно даже не сомневаться, что автономный транспорт на протяжении ближайших 5-10 лет появится на улицах наших городов.





Сообщить об опечатке
Текст, который будет отправлен нашим редакторам: