

Американские инженеры из Висконсинского университета в Мадисоне обнаружили недостаток в методе испытания марсоходов NASA на Земле.
В течение десятилетий разработчики корректировали вес марсоходов, имитируя условия низкой гравитации на Луне или Марсе, однако не принимали во внимание, как земная гравитация влияет на сам грунт. На самом деле лунный грунт гораздо более рыхлый и менее упругий, чем земной. Это приведет к тому, что роверы будут застревать в нем.
Когда космический аппарат стоимостью в миллионы долларов застревает в мягком инопланетном грунте, как это произошло с марсоходом NASA Spirit в 2009 году, вытаскивать его приходится инженерам на Земле. Они действуют как дистанционная буксировочная команда, посылая роверу тщательно спланированные указания по перемещению колес или изменению траектории движения. Это медленный и очень деликатный процесс.
В частности, инженерам в 2009 году так и не удалось освободить Spirit, однако возможно в дальнейшем роверам удастся избегать такой участи. Инженеры-механики из Висконсинского университета по результатам моделирования обнаружили недостаток современных методов наземных испытаний инопланетных вездеходов.
Недостаток, как отмечают исследователи, часто приводит к слишком оптимистичным прогнозам относительно поведения роверов в реальных условиях на Луне или Марсе. Ключевым для планирования миссии является понимание того, как марсоход будет двигаться по внеземным поверхностям, в условиях низкой гравитации, и будет избегать препятствий, включая мягкий грунт и каменистые территории.
Лунная гравитация составляет лишь одну шестую часть от земной. Инженеры в течение десятилетий учитывали это, создавая тестовые модели с весом, в 6 раз меньше веса реального марсохода. Затем эти аппараты испытывали в песках пустынь на Земле. Однако при этом не учитывалось, как земная гравитация влияет на песок.
С использованием передовых методов моделирования профессор Дэн Негрут и его коллеги выяснили, что земная гравитация сильнее сжимает песок по сравнению с более слабой лунной или марсианской гравитацией. Это делает земной песок или почву тверже и устойчивее, уменьшая вероятность его смещения под колесами марсохода. Однако на Луне грунт более рыхлый и подвержен смещению, что означает, что у марсоходов меньшее сцепление с поверхностью и выше риск застревания.
«Оглядываясь назад, идея проста: чтобы лучше понять, как марсоход будет вести себя на Луне, нам нужно учитывать не только гравитационное притяжение, действующее на марсоход, но и влияние гравитации на песок. Наши результаты подчеркивают ценность использования физического моделирования для анализа мобильности марсохода на сыпучем грунте», — объясняет Дэн Негрут.
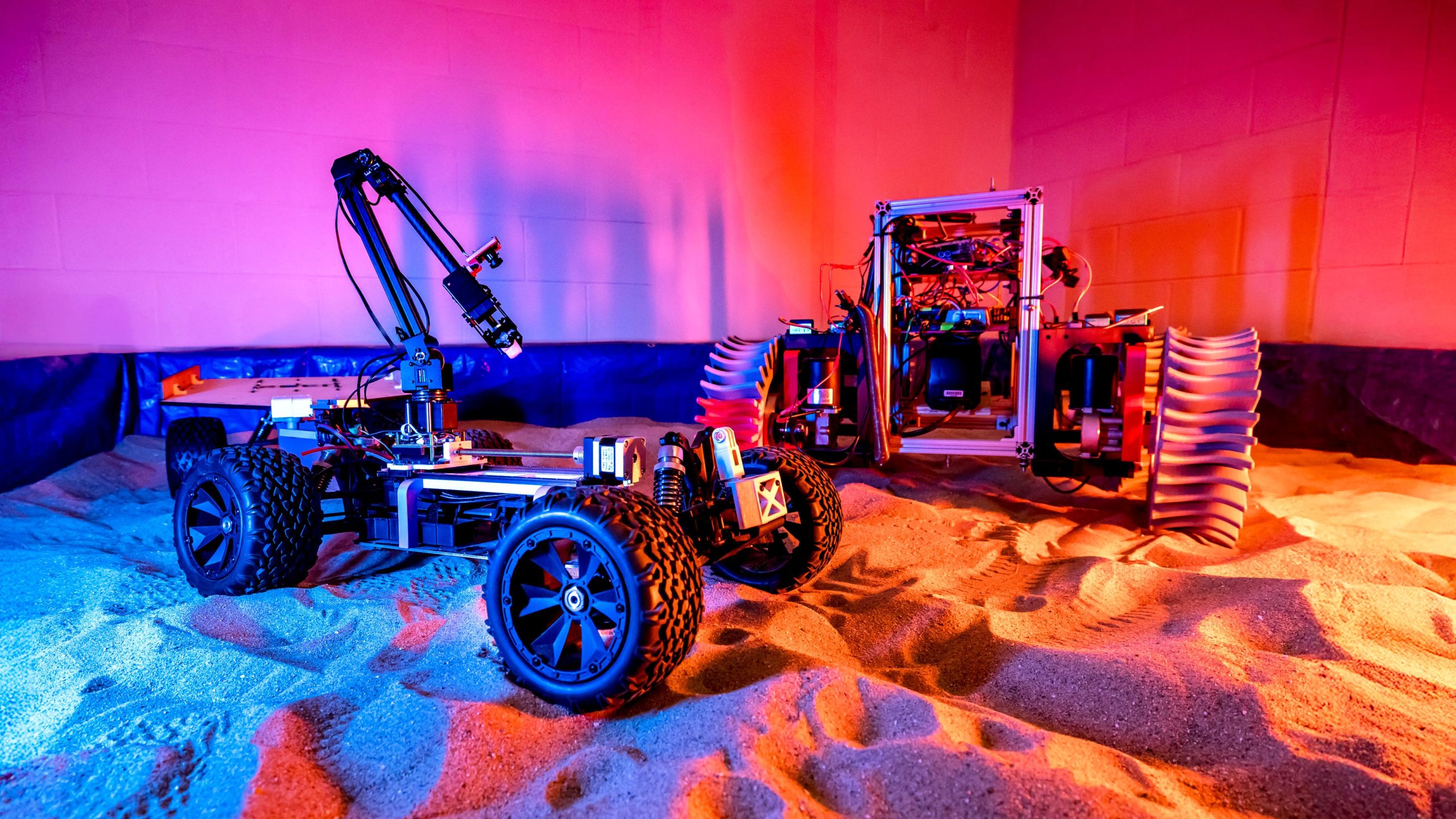
Результаты исследования ученых из Висконсинского университета являются частью работы над финансируемым NASA проектом по моделированию марсохода VIPER для миссии на Луне. Ученые использовали Project Chrono — открытый программный движок для физического моделирования, разработанный исследователями из Висконсинского университета совместно с коллегами из Италии. Это программное обеспечение позволяет исследователям быстро и точно моделировать сложные механические системы, например, полноразмерные марсоходы, работающие на мягких песчаных или грунтовых поверхностях.
Во время моделирования работы VIPER исследователи заметили различия между результатами наземных испытаний и результатами моделирования мобильности ровера на Луне. Более детальное изучение моделирования с помощью Chrono помогло выявить недостаток. Chrono используется сотнями организаций на Земле для лучшего понимания работы сложных механических систем — от точных механических часов до грузовиков и танков армии США, работающих в условиях бездорожья.
Chrono бесплатный и в свободном доступе для использования по всему миру. Команда UW-Madison постоянно прилагает значительные усилия для разработки и поддержки программного обеспечения и оказания поддержки пользователям.
Результаты исследования опубликованы в журнале Journal of Field Robotics
Источник: ScitechDaily





Сообщить об опечатке
Текст, который будет отправлен нашим редакторам: