Инженеры из Университета имени Бен-Гуриона в Израиле разработали робогусеницу, нижняя часть корпуса которой при необходимости может становиться жесткой. Благодаря этому устройство способно заползать на небольшие преграды, перелезать через условные пропасти, а также «перепрыгивать» через мелкие объекты. Разработка, получившая название Reconfigurable Continuous Track Robot (RCTR), описана в статье, опубликованной в журнале IEEE Robotics and Automation Letters.
Внешне инновационное устройство похоже на гусеницу гусеничного транспорта, например, танка: решение представляет собой гибкую замкнутую ленту, собранную из отдельных звеньев. Угол между соседними звеньями может меняться от -20 до 45 градусов, что обеспечивает системе гибкость. Внутри ленты расположены вращающие ее ролики, которые приводятся в движение тремя электродвигателями (в дальнейшем их число планируется сократить до двух).
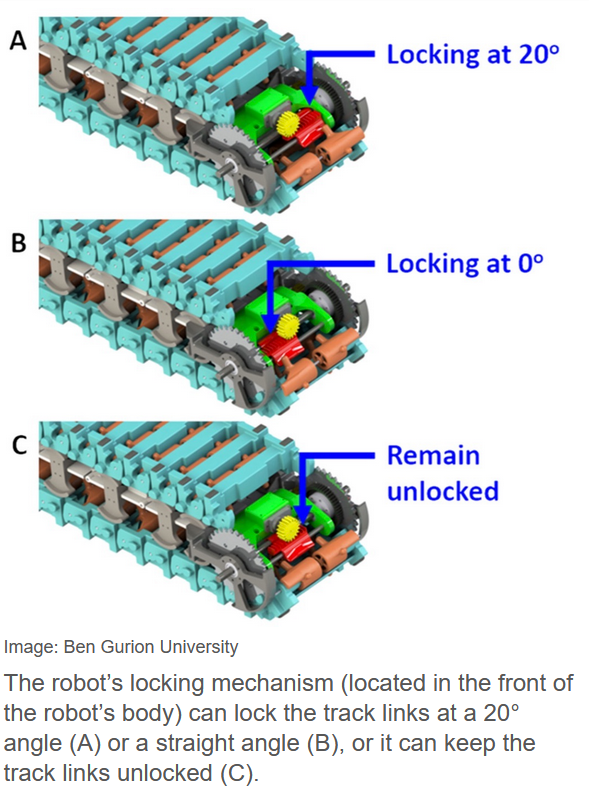
Механизм, находящийся в передней части робота, при необходимости способен блокировать проходящие через него звенья цепи, мешая им смещаться друг относительно друга. Для этого у каждого звена есть стопорные штифты, причем звенья могут блокироваться как параллельно друг другу, так и под углом в двадцать градусов — все зависит от того, в каком режиме находится система блокировки, когда по ней проходит каждое конкретное звено. Помимо этого, механизм может не блокировать звенья, оставляя их в гибком, подвижном состоянии.
 Конструкция в задней части робогусеницы, в свою очередь, спроектирована таким образом, чтобы заблокированные звенья, когда они ее достигают, пассивно деблокировались. Таким образом, в то время как одна часть робота (верхняя) всегда остается гибкой, другая часть (нижняя) в нужные моменты времени может становиться жесткой, несгибаемой, и благодаря этому устройство способно совершать нетривиальные маневры. Например, робогусеница способна «перепрыгнуть» небольшое препятствие, не коснувшись его ни одним звеном, а также заползти на крупную преграду — для этого робот блокирует часть звеньев под углом, чтобы изогнуть свое тело.
Конструкция в задней части робогусеницы, в свою очередь, спроектирована таким образом, чтобы заблокированные звенья, когда они ее достигают, пассивно деблокировались. Таким образом, в то время как одна часть робота (верхняя) всегда остается гибкой, другая часть (нижняя) в нужные моменты времени может становиться жесткой, несгибаемой, и благодаря этому устройство способно совершать нетривиальные маневры. Например, робогусеница способна «перепрыгнуть» небольшое препятствие, не коснувшись его ни одним звеном, а также заползти на крупную преграду — для этого робот блокирует часть звеньев под углом, чтобы изогнуть свое тело.
Практические испытания новинки показали, что гусеничный аппарат длиной около 50 сантиметров прекрасно справляется с каменистыми ландшафтами, покрытыми травой неровными площадками и отдельно стоящими препятствиями высотой до 20 сантиметров.
Главный недостаток робота состоит в том, что он в настоящее время способен двигаться только по прямой, что существенно ограничивает его потенциальное применение, однако в будущем инженеры планируют исправить этот недостаток, добавив рулевое устройство (возможно, речь пойдет о двух спаренных гусеницах — тогда в робогусенице можно будет применить схему руления, обычную для гусеничного транспорта). Помимо этого, исследователи намерены разработать алгоритм автономного управления роботом, который, в числе прочего, позволит аппарату эффективно перемещаться по разным типам ландшафта и преодолевать препятствия, комбинируя некоторым образом заблокированные и деблокированные звенья ленты устройства.
По мнению авторов, разработанное ими решение потенциально может найти применение в поисково-спасательных операциях, сельском хозяйстве, инспектировании труб, промышленном обслуживании и других сферах.
Источник: IEEE Spectrum





Сообщить об опечатке
Текст, который будет отправлен нашим редакторам: