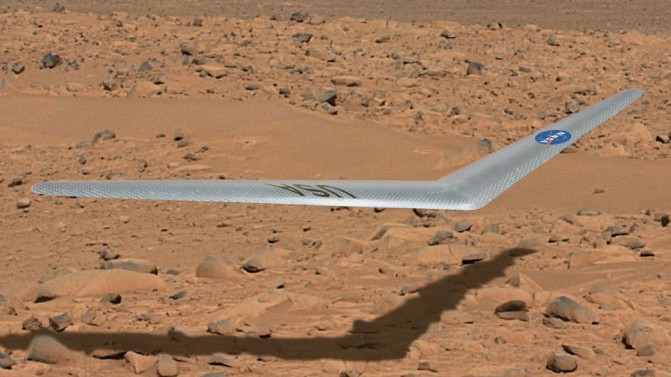
Национальное управление США по воздухоплаванию и исследованию космического пространства (NASA) рассказало о новом любопытном проекте. То, что изображено на иллюстрации выше, вовсе не высокотехнологическая версию бумеранга, а, возможно, первый в своем роде летательный аппарат, который в будущем будет «бороздить» марсианское воздушное пространство.
В настоящее время инженеры NASA разрабатывают прототип Prandtl-m (Preliminary Research Aerodynamic Design to Land on Mars), планера-беспилотника, который сможет взлетать с опускающегося на марсианскую поверхность ровера для поиска оптимальных мест посадки космического корабля в рамках возможной будущей пилотируемой марсианской миссии. Двухметровый летательный аппарат на Земле будет весить около 1,18 кг, но гравитация на Марсе значительно ниже, чем на нашей планете, поэтому там он будет весить около 450 г – достаточно, чтобы пролететь чуть более 30 км после запуска с высоты около 600 м.
Хотя запуск нового марсохода состоится где-то в промежутке между 2022 и 2024 годом, возможность увидеть аппарата в действии появится гораздо раньше. К концу этого года NASA планирует завершить работы над прототипом и провести первый тестовый запуск с воздушного шара. Во время второго тестового полета, который намечен на следующий год, Prandtl-m проведет в воздухе не меньше 5 часов и самостоятельно осуществит посадку на земную поверхность. И, наконец, третий потенциальный испытательный полет будет включать имитацию запуска финальной версии дрона со спутника формата CubeSat. Разумеется, до появления первых поселений людей на планете Марс пройдет еще несколько десятков лет (в лучшем случае), но, вне всякого сомнения, проект Prandtl-m является очередным важным шагом в этом направлении.
Источник: Engadget





Сообщить об опечатке
Текст, который будет отправлен нашим редакторам: