

Дослідники з Кембридзського університету створили крихітний тактильний датчик, здатний наблизити тактильні відчуття роботів до людських.
Нова технологія базується на композиті з рідких металів та графені. Оболонка дозволяє роботизованим системам визначати не тільки силу під час натискання на об’єкт, а й напрям прикладених сил, чи ковзає при цьому об’єкт, шорсткість поверхні у масштабі близькому до можливостей кінчиків людських пальців.
Людські пальці використовують велику кількість механічних рецепторів для одночасного сприйняття тиску, сили, вібрації та текстури. Відтворення такого багаторівневого тактильного відчуття у роботизованих системах доволі складне завдання.
“Більшість чинних тактильних датчиків або занадто громіздкі, або занадто крихкі, або занадто складні у виготовленні, або не здатні точно розрізняти нормальні та тангенціальні сили. Це було серйозною перешкодою на шляху до досягнення дійсно спритної роботизованої маніпуляції”, — зазначає професор з центру вивчення графену у Кембриджі Тауфік Хасан.
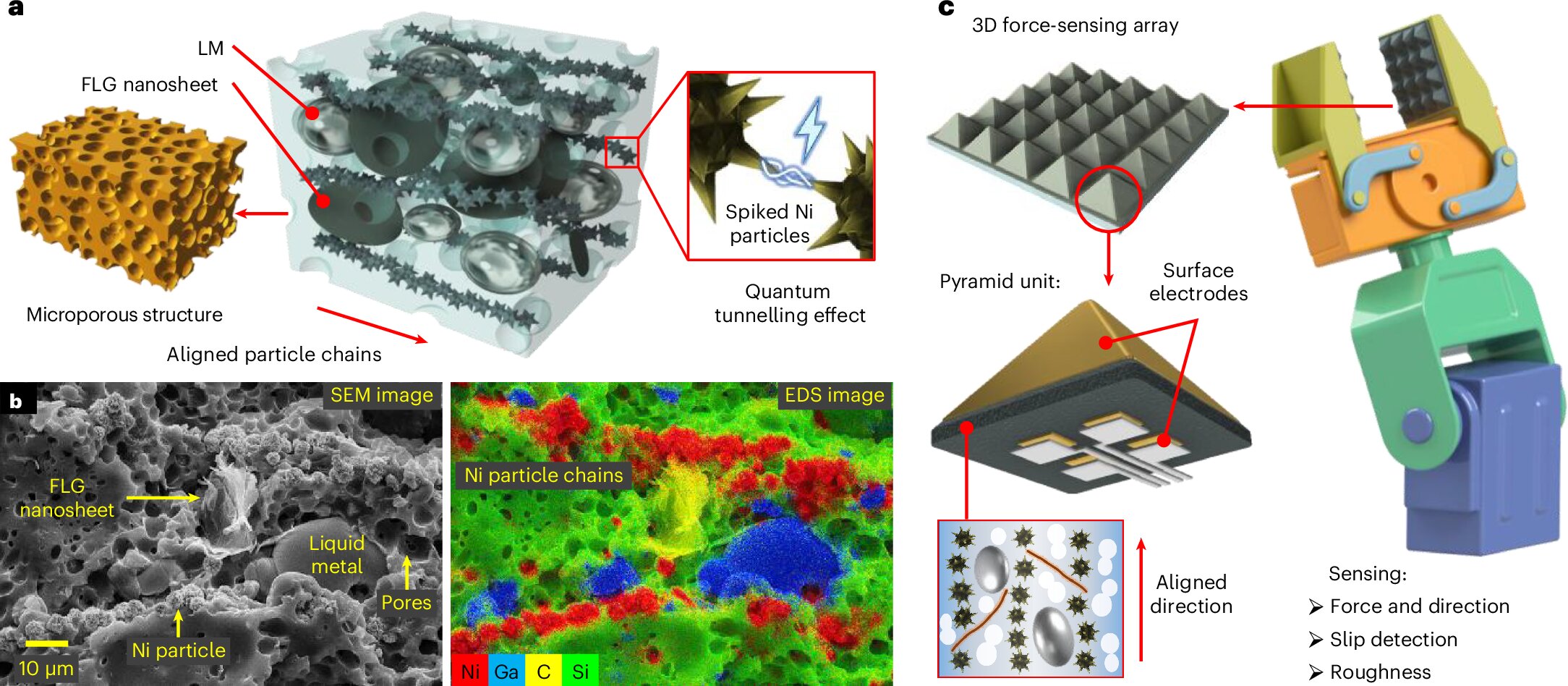
Дослідники розробили м’який та гнучкий композитний матеріал, що поєднує у собі листи графену, деформовані металеві мікрокраплі та частинки нікелю, введені у силіконову матрицю. Науковці надали матеріалу форму крихітних пірамідок, деякі з них досягають 200 мкм в поперечнику. Ці структури концентрують напругу на власних вершинах та дозволяють датчику виявляти надзвичайно малі сили.
Такий тактильний датчик достатньо чутливий для виявлення піщинки. Порівняно з наявними тактильними датчиками, новий пристрій перевершує їх як за розмірами, так і за межами виявлення. Він здатен розрізняти сили зсуву від нормального тиску та визначати момент початку ковзання об’єкта. Вимірюючи сигнали з чотирьох електродів під кожною пірамідкою, датчик математично відновлює повний тривимірний вектор сили в режимі реального часу.
За результатами випробувань дослідники інтегрували датчики у роботизовані захвати, надавши змогу роботам захоплювати крихкі об’єкти, наприклад, тонкі паперові трубки, та не розчавлювати їх. На відміну від традиційних датчиків сили, які покладаються на попередню інформацію про властивості об’єкта, нова система адаптується в режимі реального часу внаслідок виявлення прослизання об’єкта.
У менших масштабах мікросенсори можуть виявляти масу, геометрію та щільність матеріалу крихітних металевих сфер внаслідок аналізу величини та напряму сили. Це дає змогу використовувати їх у малоінвазивній хірургії та мікроробототехніці. Технологія також може бути корисною у протезуванні. Вдосконалені штучні кінцівки все частіше покладаються на тактильний зворотний зв’язок для забезпечення відчуття дотику.
“Наш підхід показує, що для досягнення високоточного тривимірного тактильного сприйняття не потрібні громіздкі механічні конструкції або складна оптика. Поєднуючи інтелектуальні матеріали зі структурами, створеними за зразком шкіри, ми досягаємо характеристик, які дивно близькі до тактильних відчуттів людини”, — зазначає провідний автор дослідження, професор Китайського університету науки та технологій Голінь Юнь.
Надалі дослідники сподіваються ще більше зменшити власні датчики до розміру менш як 50 мкм, наблизивши їх до щільності механічних рецепторів у людській шкірі. У майбутніх версіях також можуть бути інтегровані датчики температури та вологості.
Раніше ми писали, що група південнокорейських дослідників з Ульсанського науково-технологічного інституту (UNIST) представила штучні м’язи, здатні перетворюватись з м’яких та гнучких на жорсткі та міцні. Вчені також розробили тактильну взаємодію з приладами через м’які матеріали.
Результати дослідження опубліковані у Nature
Джерело: TechXplore





Повідомити про помилку
Текст, який буде надіслано нашим редакторам: