

Исследователи из Института робототехники и искусственного интеллекта (RAI) создали велоробота Ultra Mobility Vehicle (UMV). Он быстро движется, держит баланс, маневрирует, перепрыгивая через препятствия и даже становится на одно колесо.
Двухколесный велоробот успешно справляется с динамическим маневрированием, не уступая навыками опытным велосипедистам. Как отмечают соавторы разработки Бен Боксер и Сурья Сингх, ключевой задачей робототехники является поиск баланса между способностью роботизированных платформ быстро двигаться и успешно преодолевать различные типы местности.
«Колеса обеспечивают эффективность, а ноги помогают преодолевать лестницы, бордюры и неровную местность. В итоге приходится выбирать между тем, насколько сложным, дорогим и энергоемким должен быть робот, и тем, насколько он способен преодолевать неизвестные препятствия во время движения. Мы постоянно возвращались к тому факту, что велосипедисты-триалисты и горные велосипедисты ежедневно преодолевают этот разрыв», — отмечают разработчики.
Разработчики вдохновлялись трюками, которые выполняют опытные велосипедисты, в частности, способностью быстро двигаться по разным типам местности, перепрыгивать через препятствия и балансировать на одном колесе. Они взялись создать двухколесного робота с велосипедной рамой, способного воспроизводить эти самые трюки.
«Мы спросили себя: а что, если бы взять тот же формфактор и наделить его способностью динамически изменять положение своей массы — подобно тому, как велосипедист смещает свое тело — используя компактный шарнирный механизм и современное управление на основе машинного обучения? Наша главная цель состояла в том, чтобы показать, что для достижения спортивных движений роботу не требуется десятка степеней свободы. Мы хотели продемонстрировать, что робот на велосипедной основе, который имеет всего пять управляемых степеней свободы, может двигаться с высокой скоростью, динамично сохранять равновесие и перепрыгивать препятствия, которые выше самого робота», — рассказывает Бен Боксер.
Как объясняет Сурья Сингх, главным отличием является пространственно-механизированная система соединения между тяжелым головным блоком и рулевой рамой. Большая часть массы робота содержится именно в главном блоке, включая аккумуляторы, вычислительные компоненты и исполнительные механизмы.
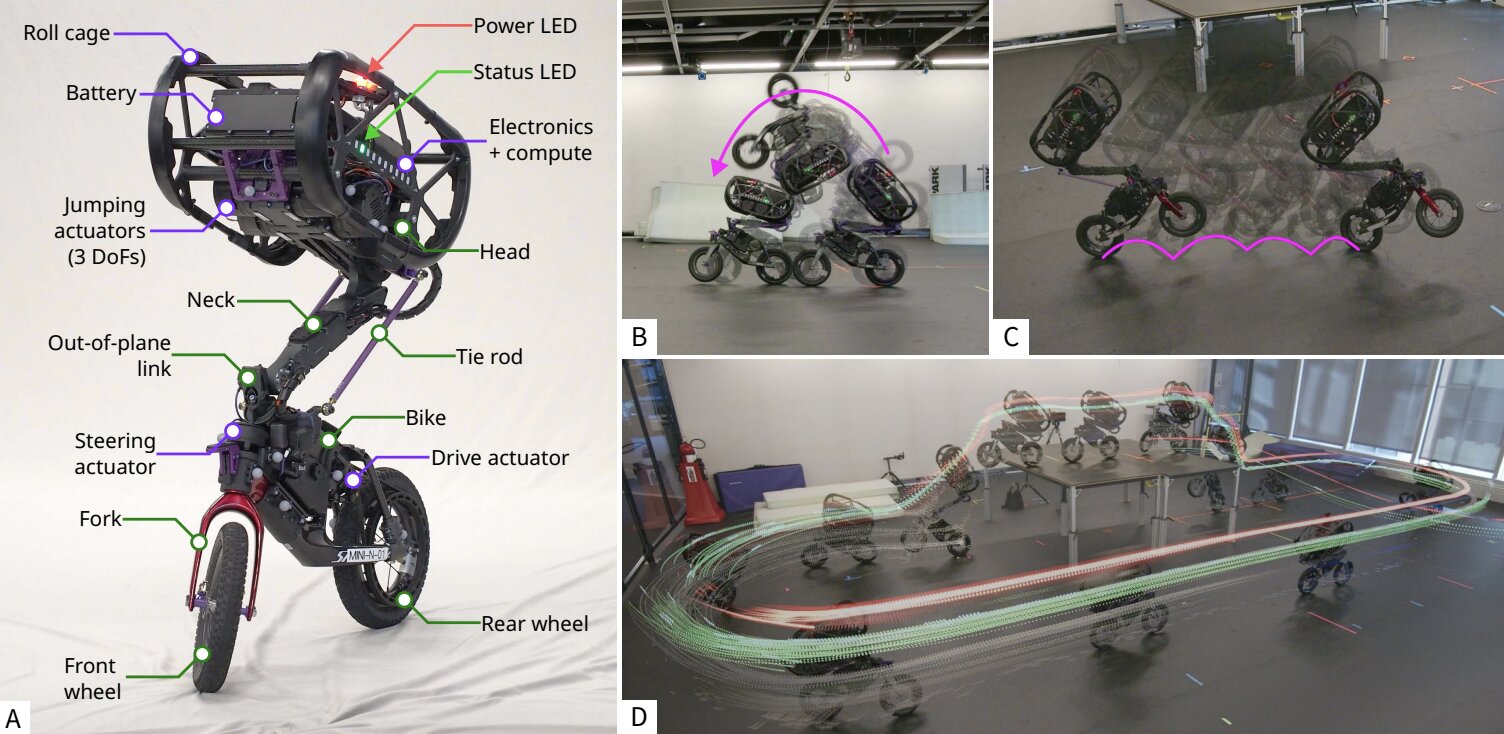
Эти механизмы позволяют роботу точно распределять собственную массу, приседать, а затем подпрыгивать или смещаться в сторону для поддержания равновесия. Команда использовала подход обучения с подкреплением. Обучение полностью проводилось в симуляции, а затем переносилось на реальную роботизированную платформу.
«Это важно, поскольку многие из этих действий, такие как «поворот с вилянием», когда робот поворачивается на месте, быстро смещая переднее колесо в сторону, не были явно запрограммированы. Они возникли как решения, найденные алгоритмом обучения самостоятельно», — отмечает Боксер.
Это позволяет роботу автономно определять оптимальную последовательность движений для успешного выполнения маневров. Исследователи планируют вскоре усовершенствовать платформу и продемонстрировать ее функциональность в широком диапазоне применений.
«С точки зрения практического применения, сочетание скорости, компактных размеров и способности преодолевать препятствия, позволяет использовать UMV в городских условиях доставки, междугородних перевозках по пересеченной местности или для инспекции в условиях, где более габаритное транспортное средство не может проехать», — подчеркивает Бен Боксер.
Сейчас сотрудники RAI планируют новые исследования, направленные на дальнейшее повышение производительности своего робота и расширение его возможностей. В конце концов они надеются полностью преодолеть разрыв между моделированием и реальными экспериментами, обеспечив тем самым лучшую готовность UMV к навигации в непредсказуемых и динамических условиях.
Ранее мы писали, что искусственная кожа из графена приблизит тактильные ощущения роботов к человеческим. В то же время Honor интригует новым видеоо Robot Phone — смартфон, который имеет роботизированную руку.
Источник: TechXplore





Сообщить об опечатке
Текст, который будет отправлен нашим редакторам: