Несмотря на то, что четвероногие роботы Boston Dynamics уже уверенно чувствуют себя на пересеченной местности, все еще существует много сложных участков пути, которые могут оказаться им не по зубам.
С помощью камер и сенсоров такие роботы умеют оценивать обстановку и находить оптимальный маршрут, однако в расчет принимаются только те препятствия, которые находятся в непосредственной видимости робота.
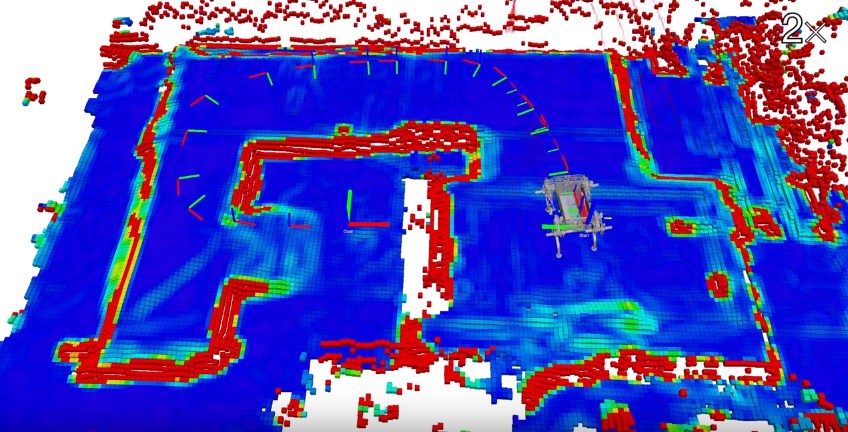
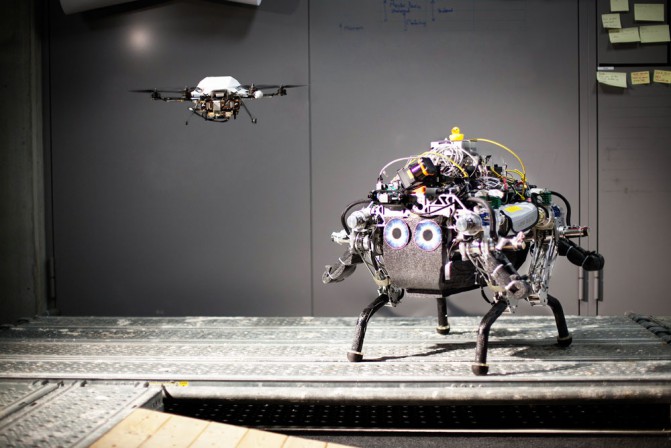
Для того, чтобы роботы позже не попали в тупик в ETH Zurich Autonomous Systems Lab работают над кооперацией между ходячими и летающими роботами. Небольшой воздушный дрон выполняет роль разведчика и создает трехмерную карту окружающей местности с уровнями высоты.
Полученная карта передается шагающему роботу, который анализирует перепады высот и находит оптимальный маршрут на карте. После этого робот передвигается по оптимальной траектории, но дополнительно использует собственные сенсоры для того, чтобы обнаруживать новые возможные препятствия (которые специально создаются в тестах).
Можно представить, что с ростом емкости батарей кооперация между роботами будет только совершенствоваться и летающий робот сможет помогать своему наземному коллеге восстановить равновесие или перевернуться, а в некоторых случаях, возможно, и преодолеть невысокое препятствие, что без дополнительной помощи четвероногому роботу было бы не по силам.





Сообщить об опечатке
Текст, который будет отправлен нашим редакторам: