


Развитие компьютерных технологий как воплощение идеи виртуальной реальности несет много полезного и интересного не только для сферы развлечений – последнее время в новостях всё чаще мелькают перспективы широкого использования достижений IT в области медицины, вплоть до исправления генома человека. Много чего можно ожидать от такого использования в отдалённом будущем, а временами – уже сейчас или в самое ближайшее время, например, для таких редких случаев заболеваний, как у Стивена Хокинга. Продолжим рассказ об истории воплощения в жизнь концепции компьютерной виртуальной реальности, обратив внимание на этот аспект её реализации.
Идея виртуальной компьютерной реальности, неотличимой от реальности настоящей, которая не одно десятилетие выступала ориентиром для мечтателей и изобретателей, ищущих оптимальные способы организации общения человека с машиной, во многом послужила и развитию применения информационных технологий в сфере медицины. Пожалуй, более всего этому способствовали попытки сконструировать интерфейс, благодаря которому можно было бы передавать человеку весь комплекс ощущений. Так, идеи Айвена Сазерленда касательно «совершенного дисплея», способного задействовать не только зрение человека, но также и слух, и осязание, оказались источником вдохновения для другого выдающегося пионера компьютерных технологий – Фредерика Брукса, одного из создателей семейства мейнфреймов IBM System/360 и автора 8-битного байта.
В 1967 году Брукс основал в Университете Северной Каролины проект под названием GROPE, целью которого была разработка хаптического (иначе говоря, осязательного) интерфейса для молекулярных сил и который стал первой попыткой применения идей виртуальной реальности в области медицины и биохимии. Смысл сконструированного группой Брукса устройства заключался в том, чтобы микробиолог, занимающийся молекулярным дизайном лекарственных препаратов, мог ясно ощущать на себе действия сил ограничения, что помогало бы ему быстрее и нагляднее определять совместимые друг с другом структуры молекул. В 1976 году Бруксу и его коллегам удалось сконструировать для GROPE II уже более-менее соответствующее этому назначению периферийное устройство для компьютера – ARM, или «Аргоннский дистанционный манипулятор», – своего рода электронно-механическую руку. Крепилась она к потолку, как шлем Сазерленда; управляя им, оператор мог помещать новую молекулу на любое место в воссозданной в виртуальной реальности структуре вещества – и в буквальном смысле слова чувствовать посредством своей собственной руки силы, притягивающие или отталкивающие «новичка» от других молекул.

По идее Фредерика Брукса, виртуальная реальность вообще призвана была сформировать качественно новый тип взаимодействия компьютера и человека, помещая последнего в полноценный искусственный мир, а не демонстрируя ему всего лишь небольшое по размерам окно в этот мир или математическую его абстракцию, – иными словами, виртуальность должна выступать фактором, усиливающим наш интеллект, а не заменяющим таковой вычислительной мощью процессоров ЭВМ. Позднее группа из Университета Северной Каролины пыталась привлечь к своим разработкам спонсоров из мира большого IT, таких как Hewlett-Packard, дабы воплотить трёхмерную графику и хаптический интерфейс и в широком ассортименте настольных ПК, – но из этой затеи так ничего и не вышло. Впрочем, и в 1980-х годах, и позднее Брукс и его коллеги продолжали работать в этом направлении, разработав, в частности, nanoManipulator – устройство виртуальной реальности, присоединённое к сканирующему атомно-силовому микроскопу и состоящее из стереоочков с отслеживанием позиции головы и хаптического контроллера, напоминающего пишущую ручку и позволяющего в некотором роде прикасаться к микромиру.
Однако тем временем идею осязательного интерфейса для взаимодействия человека с компьютером переняли уже и другие исследователи, поставившие перед собою немного более простую и широкую по назначению задачу: создать «электронную перчатку». Первое устройство такого рода сконструировали в 1977 году американские исследователи Том Дефанти и Дэниэл Сандин – последний сотрудничал до этого с Майроном Крюгером и перенял многие его идеи в плане искусственной реальности. Названа работа была именем их третьего коллеги, Ричарда Сэйри, который предложил сам принцип действия прибора: на перчатку прикреплялись тонкие гибкие трубочки с источником света на одном конце и фотоэлементом на другом – при сгибании суставов изменялось количество света, достигавшего фотоэлементов, что позволяло более-менее точно измерять положение пальцев. «Перчатка Сэйри» оказалась лёгким и сравнительно недорогим аппаратом, но никакого практического распространения не получила из-за невысокой функциональности: с её помощью можно было разве что имитировать управление какими-нибудь ползунками или переключателями.

В дальнейшем исследования были направлены в сторону увеличения функциональности «компьютеризованной руки», тем не менее, ни один проект не достиг широкой популярности: одни перчатки были слишком громоздкими и не очень-то способствовали свободе движений пальцев, другие требовали длительной и сложной процедуры калибровки, да и себестоимость и тех, и других не позволяла мечтать о запуске в производство коммерческой версии. В самом начале 1980-х годов исследователи из Группы машинной архитектуры Массачусетского технологического института сконструировали перчатку со встроенной системой светодиодов – для отслеживания и захвата движений руки при помощи подключённой к ЭВМ видеокамеры. В 1983 году Гэри Граймс из Bell Labs запатентовал «Digital Data Entry Glove» – перчатку с датчиками движения, встроенными у кончиков пальцев, а также на запястье, предназначение которой было совсем иным и также непосредственно связанным с медициной: распознавать символы жестового языка глухонемых. Впрочем, и здесь до запуска прототипа в производство дело так и не дошло.
Наиболее универсальной по функциональности стала перчатка DataGlove, созданная в 1987 году Томасом Циммерманом. Устройство оснащалось кабелями из оптического волокна, по два на каждый палец, снабжённых, подобно перчатке Сэйри, фонариком на одном конце и светодиодом на другом и измерявших таким образом положение суставов. Точность измерения достигала одного градуса в теории и 5–10 градусов на практике: достаточно для общего отслеживания движений, но не для совершения тонких манипуляций. Зато не существовало никаких проблем с передачей сигнала от перчатки к компьютеру, значительно затруднявших использование устройств со светодиодами или другими датчиками в случае отсутствия прямой видимости между ними и приёмником. Именно перчатка Циммермана стала первым коммерчески доступным аппаратом для управления компьютером при помощи тактильных движений – производилась она компанией VPL Research и предлагалась по цене в 9000 долларов: понятно, что такая стоимость, как и необходимость точной калибровки устройства перед его использованием, ограничивали потенциальную аудиторию исключительно организациями, по большей части, исследовательскими.

Впрочем, идеи Циммермана пришлись по душе Nintendo, которая решила переделать VPL DataGlove в периферию для подключения к своей игровой консоли. Дизайн был поручен двум специалистам из игрушечной компании Abrams/Gentile Entertainment, а сам Томас Циммерман и даже такой авторитетнейший специалист (и автор самого понятия виртуальной реальности) как Джером Ланье были привлечены к проекту в качестве консультантов. Разработка Nintendo Power Glove заняла всего около двух месяцев – по сути дела, создан был значительно упрощённый и удешевлённый вариант DataGlove. Пластмассовый корпус оснащался стандартным контроллером NES с дополнительными программируемыми кнопками и благодаря установленным на четыре из пяти пальцев датчикам с электропроводящими красками (мизинец в целях экономии оставался незадействованным) мог передавать приставке также и положение пальцев. Кроме этого, на перчатке были установлены два ультразвуковых динамика, транслирующие звук – на недоступной человеческому уху частоте 40 КГц – на три микрофона, расположенных вокруг монитора и отслеживавших движение руки по продольной и вертикальной осям путём триангуляции источников звука.
В результате стоимость устройства в рознице составила всего 75 долларов – однако и Power Glove переворота в интерфейсе не совершила, и массовым атрибутом геймера не стала: помимо Японии она продавались только в США, где разошлась в количестве примерно 100 тыс. экземпляров. Несмотря на обширную рекламную компанию, включавшую в себя демонстрацию перчатки в детском приключенческом фильме 1989 года «Волшебник», в ассортименте Nintendo числились всего лишь два игровых продукта, в полной мере использовавших возможности нового устройства, – трёхмерная головоломка Super Glove Ball, в которой при помощи движения руки нужно было отбивать мячик от стен из разрушающихся блоков, и beat’em up-игра под названием Bad Street Brawler.

Идеи хаптического интерфейса в какой-то мере реализовались в наши дни – с одной стороны, в touch-интерфейсе современных смартфонов и планшетов, а с другой – в контроллерах наподобие Wii Remote или Microsoft Kinect, – хотя, разумеется, до полноценной виртуальной реальности с её полнотой всех человеческих ощущений дело пока ещё не дошло. Однако идея «электронной руки» получила своё закономерное развитие в области медицины – а точнее, протезирования. Первым устройством такого рода стала Boston Digital Arm, созданная в 2001 году компанией Liberating Technologies из Массачусетса. Протез локтевого сгиба, оснащённый микропроцессором, позволял совершать движения по пяти осям и перепрограммировать аппарат для настройки «под себя».
Позднее появились и более совершенные произведения компьютерной техники – такие, как электронная кисть Bebionic hand, разработанная в 2010 году английским производителем протезов RSLSteeper, – с десятью предустановленными позициями руки и четырьмя дополнительными, программируемыми при помощи ПО. Пользователи такого устройства могут выполнять практически все повседневные действия – включая набор текста на клавиатуре, использование компьютерной мышки или взятие и использование любых мелких объектов. В зависимости от размера кисти вес устройства составляет от 369 до 698 грамм, а цена – около 9 тыс. евро. При желании на механическую руку можно надеть и перчатку телесного цвета, чтобы её можно было не отличить от настоящей кисти. Неоднократно сообщалось в наших новостях и о протезах, передающих тактильные ощущения, и управляемых непосредственно нервной системой.

Разумеется, компьютерные технологии помогают не только в передаче тактильных ощущений – не менее актуальны они и в деле восстановления утраченного зрения. Наряду с бионическими руками, встречаются в новостях и сведения о бионических линзах – например, таких, которые разрабатывает в настоящее время канадская компания Ocumetics Technology. Впрочем, никаких подробностей о своих технологиях авторы не раскрывают – и ожидать появления на рынке готового продукта просят не ранее чем через два года (столько времени, по их словам, должно занять одобрение линз соответствующими органами в Канаде и в Европе – в других странах ещё дольше). Зато цена должна не очень кусаться: около 3200 долл. за один глаз.
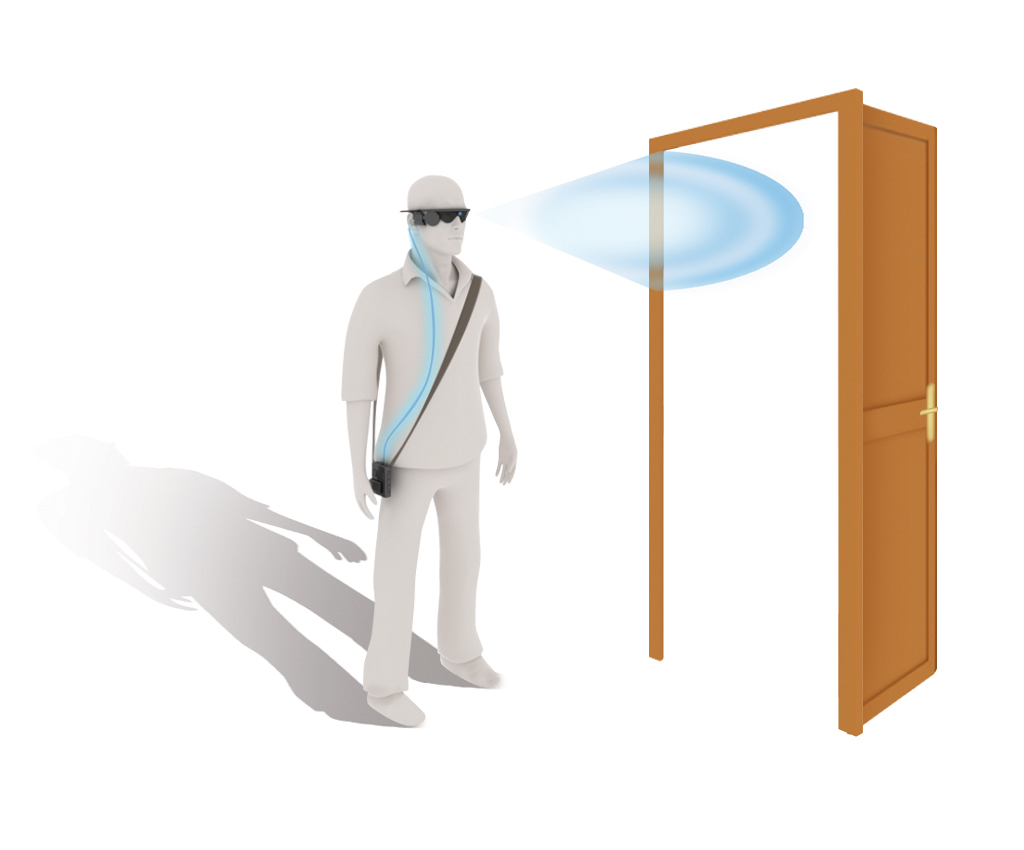
А из уже имеющихся в коммерчески доступном виде устройств следует вспомнить систему «бионического глаза», или протеза сетчатки Argus, о которой уже упоминалось на нашем сайте пару лет назад. На сегодня значительно обновлённый вариант устройства, Argus II, разработанный офтальмологом из Университета Южной (на этот раз) Каролины Марком Хумаюном и производимый калифорнийской компанией Second Sight, успешно одобрен к использованию сначала в Европе и Саудовской Аравии, а затем и в США. Смысл работы такой системы заключается в электростимуляции сетчатки для воспроизведения визуального восприятия у слепых. Состоит она из очков, соединённых кабелем с небольшого размера портативным компьютером, а также из имплантата, оснащённого антенной и хирургически устанавливаемого непосредственно в глаз.

В очки встроена миниатюрная видеокамера, передающая сигнал на компьютер, где полученное видео перерабатывается и, в свою очередь, транслируется радиосигналом на антенну имплантата. В результате образуются импульсы электричества, которые стимулируют оставшиеся здоровыми клетки сетчатки, минуя повреждённые фоторецепторы глаза, – и создают у пациентов ощущение фрагментов света, которые можно научиться воспринимать как своего рода виртуализацию реальной действительности. Увы, полного зрения таким образом восстановить не получится – в лучшим случае, система позволит слепым пользователям читать буквы крупным шрифтом. Да и цену трудно назвать подходящей: стоимость комплекта оборудования составляет не менее 115 тысяч долларов, не считая расходов на операцию.
А потому понятно, что использование компьютерных технологий и, в частности, идей виртуальной реальности скрывает в себе ещё большой нереализованный потенциал для здоровья человека – не только физического, но и умственного. Главное – пожалуй, не забывать того, о чём предупреждал Фредерик Брукс: компьютер нужно рассматривать как помощника человеческого разума, а не как его заменитель. Точнее, как устройство, способное помочь заменить руку или глаз, способное предоставить нам целый комплекс всевозможных и разнообразных ощущений, – но не как заменитель мозга, перерабатывающего эти ощущения в идеи, мысли и образы.





Сообщить об опечатке
Текст, который будет отправлен нашим редакторам: