Согласованно выполнять действия — трудная задача для маленьких и незамысловатых роботов. Инженеры из США предложили на удивление простое решение: роботизированные кубики, организованные в стаю, могут перемещаться, прыгать и забираться друг на друга, формируя необходимые конструкции.
Как сообщается, специалисты Лаборатории информатики и искусственного интеллекта при Массачусетском технологическом институте работали над созданием стаи трансформирующихся роботов-кубиков свыше шести лет. Впервые о роботе под названием M-Blocks стало известно в 2013 году. Данное устройство представляет собой 163-граммовый куб со стороной 50 мм, способный перемещаться без применения внешних актуаторов — вместо них в роботе используется маховик, раскручивающийся до нужной скорости, после чего его зажимает тормозной ремень. Из-за этого крутящий момент передается на корпус робота, и он начинает вращаться или даже подпрыгивает. Поворачивая маховик перед его раскруткой, куб может выбирать направление движения. Между собой роботы соединяются с помощью магнитов.
Вместе с тем, после разработки решения инженеры столкнулись с достаточно серьезной проблемой, заключающейся в том, что робокубам требовалась надежная система коммуникации. Если с рассылающим команды компьютером разработчиков устройства могли без проблем «общаться» при помощи встроенного модуля Wi-Fi, то попытки наладить контакт друг с другом посредством радиосвязи заканчивались тем, что многочисленные сигналы, идущие от множества находящихся поблизости устройств, начинали интерферировать между собой, из-за чего коммуникация была нестабильной. Будучи неспособными на тот момент решить данную загвоздку, концепцию M-Blocks инженеры решили отложить в долгий ящик.
И вот, спустя шесть лет, исследователи наконец разработали для робокубов простую и надежную систему взаимной коммуникации и идентификации. Она состоит из двух подсистем. В основе первой лежат четыре небольших магнита, устанавливаемые на каждой из граней робота. Их полюса ориентированы определенным образом, благодаря чему каждый магнит повернут в одном из 30 возможных положений. Также на каждой грани установлено по два датчика магнитного поля. В будущих версиях авторы планируют использовать четыре датчика — по одному на каждый магнит. Такая схема позволяет роботу опознавать своих соседей. Помимо магнитных меток и датчиков в каждом роботе есть несколько светодиодов и оптических сенсоров — они составляют вторую подсистему, при помощи которой «умные» блоки могут «общаться» друг с другом.

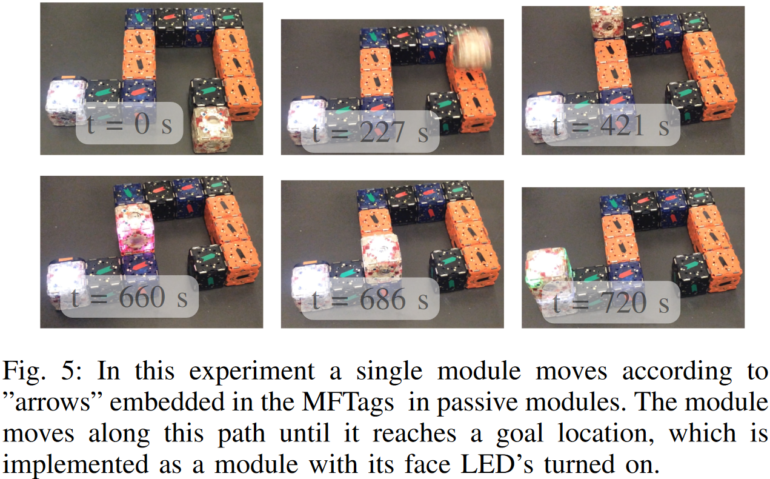
Инженеры показали три примера полуавтономного коллективного взаимодействия. В первом режиме используются пассивные и активные роботы. Пассивные установлены в виде полосы или плоскости, а активные перемещаются по ним. Сервер (им выступает компьютер разработчиков) присваивает каждому пассивному роботу виртуальную стрелку, указывающую направление движения, и передает эти данные активным. Активные роботы перемещаются по пассивным, опознавая их и ориентируясь на виртуальные стрелки.
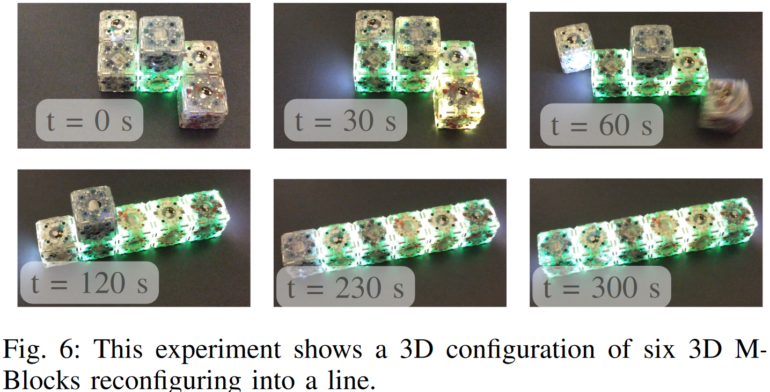
Во втором примере активные случайным образом соединенные друг с другом роботы становятся в ряд. Сначала сервер присваивает одному роботу статус центрального, а затем остальные начинают выстраиваться в линию, используя простой алгоритм, при котором они двигаются, ориентируясь на команды от центрального куба и правильно выстроенных «соседей», передаваемые через светодиоды («продолжай движение» или «прикрепляйся здесь»). Примечательно, что таким образом устройства могут самоорганизовываться как в горизонтальные, так и в вертикальные ряды.
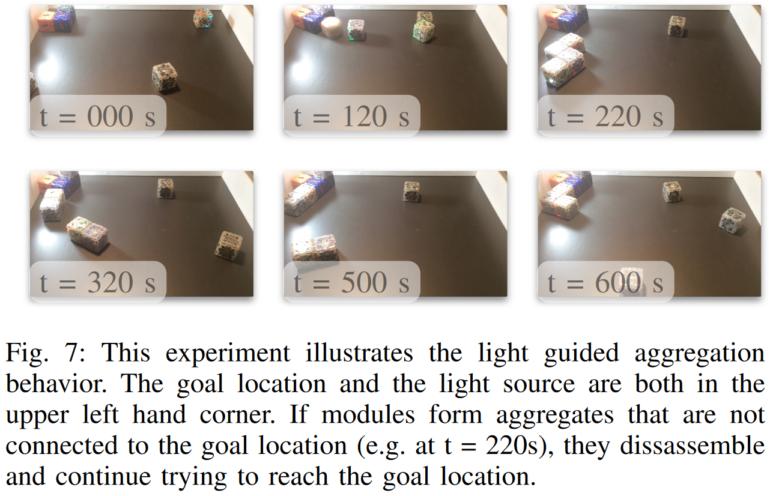
В третьем примере датчики света в роботах используются для коллективного движения к источнику света и формирования некоторой структуры вокруг выбранных сервером центральных пассивных кубов, расположенных около данного источника. В случае, если роботы случайно сталкиваются и формируют структуру, не включающую центральные кубы, они разрывают связь и продолжают двигаться дальше по направлению к свету.
Любопытно, что исследователи уверены в перспективности своего творения. По их словам, решение уникально по целому ряду параметров: оно дешево, надежно (робокубам нестрашны столкновения и падения) и его легко масштабировать до миллиона модулей, а кроме того, в то время как у большинства других роботизированных систем механизмы движения гораздо более сложны и требуют последовательного выполнения ряда действий, конструктивно и в плане принципа движения робокубы весьма незамысловаты, и в этом заключается их основное преимущество.
Пока этими блоками нельзя управлять с той же легкостью, как в игре Minecraft, но изобретатели считают, что таким роботам может найтись применение в самых различных отраслях — от инспектирования инфраструктурных объектов и до спасательных служб. К примеру, в случае пожара можно будет просто кинуть множество робокубов на землю, и они тут же самоорганизуются в лестницу, по которой смогут спуститься терпящие бедствие жильцы.
Источник: N+1





Сообщить об опечатке
Текст, который будет отправлен нашим редакторам: